
在运行我们的例程之前,首先需要采用WinSCP进入目标机空间,下载并解压我们的项目文件,替换catkin_ws中src文件内容,删除build中已有的文件,重新catkin_make进行编译,我们主要完成了对以下4个文件夹内容的修改:
资料地址:
链接:https://pan.baidu.com/s/1pEhY0935xjn0dbgVULUQ2A
提取码:995l 注:由于版本更新,请在第一次使用拷贝代码后确认base_control中base_control_moco.py,如下代码符号:

基于2D雷达的导航例程
本例程介绍如何基于ROS Melodic基本的导航包完成四足机器人在室内的自主导航,由于雷达坐标系的定义问题,如采用LD06雷达其外壳箭头需要朝向机尾。
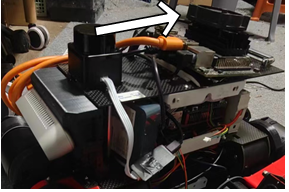
修改robot_navigation中lidar.launch雷达相对机器人质心的位置与姿态如下,其中位置需要基于具体安装位置进行修改:

第二修改目标机.bashrc文件中雷达类型:
export LIDAR_TYPE=LD06
机器人类型:
export BASE_TYPE=NanoRobot_Pro
修改base_control中base_control.launch中SDK节点IP为主控对应的IP:

之后打开虚拟机修改.bashrc中ROS Master地址为感知主控的地址,确保感知主控roscore后在虚拟机中可以显示其对应话题,然后打开4个控制台通过ssh远程进入目标机依次运行如下脚本:
roslaunch robot_navigation robot_lidar.launch
roslaunch robot_navigation hector.launch
roslaunch robot_vslam move_base.launch planner:=teb move_forward_only:=false如无误后,打开Rviz可视化,既可以看到导航结果:
roslaunch robot_navigation navigation_rviz.launch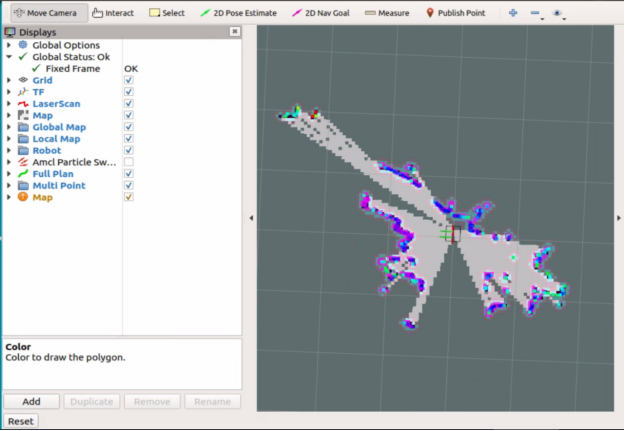
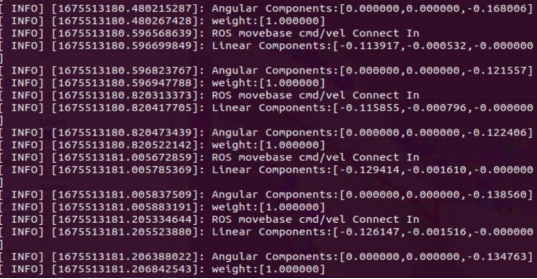
在发布2D Nav Goal后产生相应的机器人运动轨迹规划结果:
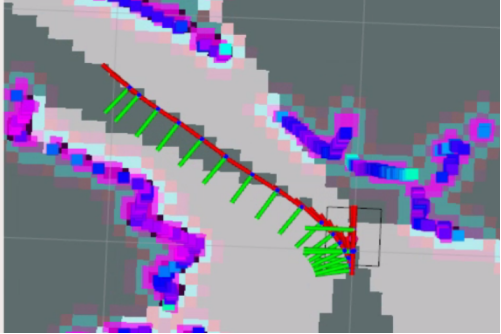
并在robot_lidar.launch的控制台中实时打印当前产生的控制指令,而机器人将以该指令作为期望,如此时机器人可移动则在进入站立后按A键进入步态运动马上按Start按键机器人自主移动,如需要遥控接管则按A恢复:
TebLocalPlannerROS:
footprint_model: # types: "point", "circular", "line", "two_circles", "polygon"
type: "line"
radius: 0.2 # for type "circular"
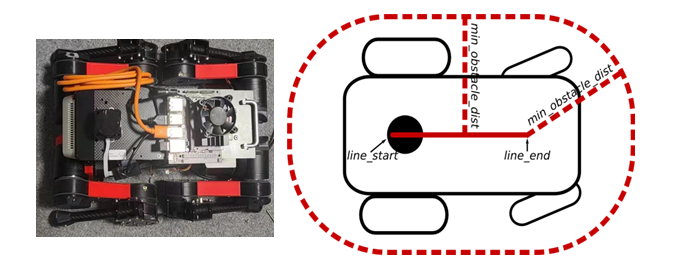
line_start: [-0.13, 0.0] # for type "line"
line_end: [0.13, 0.0] # for type "line"
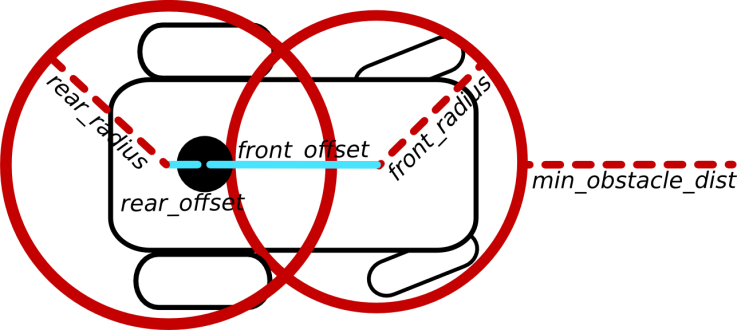
front_offset: 0.2 # for type "two_circles"
front_radius: 0.2 # for type "two_circles"
rear_offset: 0.2 # for type "two_circles"
rear_radius: 0.2 # for type "two_circles"
vertices: [ [0.25, -0.05], [0.18, -0.05], [0.18, -0.18], [-0.19, -0.18], [-0.25, 0], [-0.19, 0.18], [0.18, 0.18], [0.18, 0.05], [0.25, 0.05] ] # for type "polygon"当然你也可以采用两个圆的模型,其近似机器人轮廓的另一种可能性包括定义两个圆。每个圆由沿机器人 x 轴的偏移量和半径描述,参考下图作为示例:
关于Teb导航的参数可以在资料中查看:
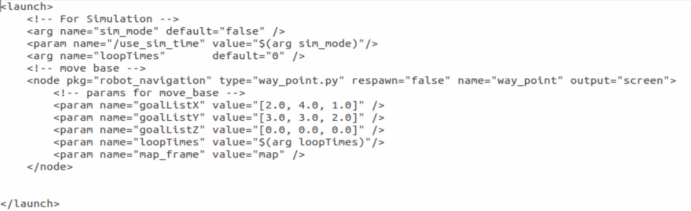
如果想实现自动化的导航和路点移动,可以运行way_point.launch或multi_points_navigation.launch如相应py脚本运行报错则需要在控制台中使用chmod +x进行授权:
如运行多路点需要重新打开rviz:
roslaunch robot_navigation multi_navigation.launch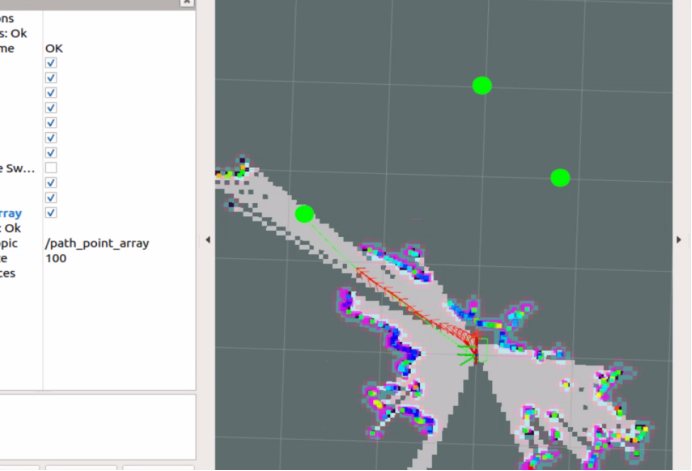
资料:
https://blog.csdn.net/qq_40828914/article/details/123059651
如需要保存地图则cd到map文件夹下,输入名称保存所需要的地图:
rosrun map_server map_saver -f home
如需要载入已经建立好的地图进行查看:
rosrun map_server map_serv home.yaml这里的/syscommand话题是为了重置建立的地图而设置的,即当向该话题中发布字符串reset时,就会将/hector_map话题中数据清除,重新开始建图,完整命令如下:
rostopic pub -1 /syscommand std_msgs/String "reset"如果想直接采用建立好的地图进行导航,固定坐标点发布连续导航路径,可以新建如下launch robot_navigation_laser,修改载入地图的名字,然后发布2D Pos estimate:
<launch>
<!-- Arguments -->
<arg name="map_file" default="$(find robot_navigation)/maps/home.yaml"/>
<arg name="simulation" default= "false"/>
<arg name="planner" default="teb" doc="opt: dwa, teb"/>
<arg name="open_rviz" default="false"/>
<arg name="use_dijkstra" default= "true"/>
<group unless="$(arg simulation)">
<!-- Map server -->
<node pkg="map_server" name="map_server" type="map_server" args="$(arg map_file)">
<param name="frame_id" value="map"/>
</node>
<!-- AMCL -->
<node pkg="amcl" type="amcl" name="amcl" output="screen">
<rosparam file="$(find robot_navigation)/param/$(env BASE_TYPE)/amcl_params.yaml" command="load" />
<param name="initial_pose_x" value="0.0"/>
<param name="initial_pose_y" value="0.0"/>
<param name="initial_pose_a" value="0.0"/>
</node>
</group>
</launch>同样启动雷达和规划节点:
roslaunch robot_navigation robot_lidar.launch
roslaunch robot_navigation robot_navigation_laser.launch
roslaunch robot_vslam move_base.launch planner:=teb move_forward_only:=false
roslaunch robot_navigation multi_navigation.launch关于Teb规划器调参可以参考:
https://blog.csdn.net/pricem/article/details/122891310
推荐的Teb Yaml参数,注意TEB导航参数参考launch使用的是robot_vslam文件夹config内对应的参数:
TebLocalPlannerROS:
odom_topic: odom
# Trajectory
teb_autosize: True
dt_ref: 0.3
dt_hysteresis: 0.1
max_samples: 500
global_plan_overwrite_orientation: True
allow_init_with_backwards_motion: True
max_global_plan_lookahead_dist: 3.0
global_plan_viapoint_sep: -1
global_plan_prune_distance: 1
exact_arc_length: False
feasibility_check_no_poses: 2
publish_feedback: False
# Robot
max_vel_x: 0.3
max_vel_x_backwards: 0.2
max_vel_y: 0.2
max_vel_theta: 6.0 # the angular velocity is also bounded by min_turning_radius in case of a carlike robot (r = v / omega)
acc_lim_x: 0.5
acc_lim_y: 0.5
acc_lim_theta: 1.5
# ********************** Carlike robot parameters ********************
min_turning_radius: 0.075 # Min turning radius of the carlike robot (compute value using a model or adjust with rqt_reconfigure manually)
wheelbase: 0.13 # Wheelbase of our robot
cmd_angle_instead_rotvel: False # stage simulator takes the angle instead of the rotvel as input (twist message)
# ********************************************************************
footprint_model: # types: "point", "circular", "two_circles", "line", "polygon"
type: "line"
line_start: [-0.13, 0.0] # for type "line"
line_end: [0.13, 0.0] # for type "line"
# GoalTolerance
xy_goal_tolerance: 0.15
yaw_goal_tolerance: 3.14
free_goal_vel: False
complete_global_plan: True
# Obstacles
min_obstacle_dist: 0.1 # This value must also include our robot's expansion, since footprint_model is set to "line".
inflation_dist: 0.6
include_costmap_obstacles: True
costmap_obstacles_behind_robot_dist: 1.0
obstacle_poses_affected: 15
dynamic_obstacle_inflation_dist: 0.6
include_dynamic_obstacles: True
costmap_converter_plugin: ""
costmap_converter_spin_thread: True
costmap_converter_rate: 5
# Optimization
no_inner_iterations: 5
no_outer_iterations: 4
optimization_activate: True
optimization_verbose: False
penalty_epsilon: 0.1
obstacle_cost_exponent: 4
weight_max_vel_x: 2
weight_max_vel_theta: 1
weight_acc_lim_x: 1
weight_acc_lim_theta: 1
weight_kinematics_nh: 1000
weight_kinematics_forward_drive: 1
weight_kinematics_turning_radius: 1
weight_optimaltime: 1 # must be > 0
weight_shortest_path: 0
weight_obstacle: 100
weight_inflation: 0.2
weight_dynamic_obstacle: 10 # not in use yet
weight_dynamic_obstacle_inflation: 0.2
weight_viapoint: 1
weight_adapt_factor: 2
# Homotopy Class Planner
enable_homotopy_class_planning: False
enable_multithreading: True
max_number_classes: 4
selection_cost_hysteresis: 1.0
selection_prefer_initial_plan: 0.95
selection_obst_cost_scale: 1.0
selection_alternative_time_cost: False
roadmap_graph_no_samples: 15
roadmap_graph_area_width: 5
roadmap_graph_area_length_scale: 1.0
h_signature_prescaler: 0.5
h_signature_threshold: 0.1
obstacle_heading_threshold: 0.45
switching_blocking_period: 0.0
viapoints_all_candidates: True
delete_detours_backwards: True
max_ratio_detours_duration_best_duration: 3.0
visualize_hc_graph: False
visualize_with_time_as_z_axis_scale: False
# Recovery
shrink_horizon_backup: True
shrink_horizon_min_duration: 10
oscillation_recovery: True
oscillation_v_eps: 0.1
oscillation_omega_eps: 0.1
oscillation_recovery_min_duration: 10
oscillation_filter_duration: 10在线参数调节可以使用:
rosrun rqt_reconfigure rqt_reconfigure
