
使用方法:
- 修改主控IP地址,编译后在bin文件夹中运行./run执行文件,激活机器人在进入站立后按遥控Start按键进入自动模式
项目简介:
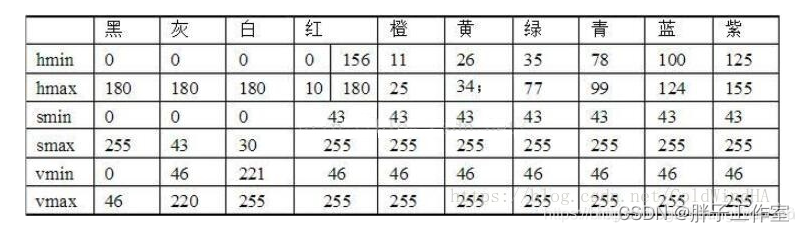
通过OpenCV的HSV颜色通道可以完成对不同颜色小球的识别,典型的颜色通道HSV值可以设置如下,通过调节拖动条可以快速完成对识别颜色的改变:
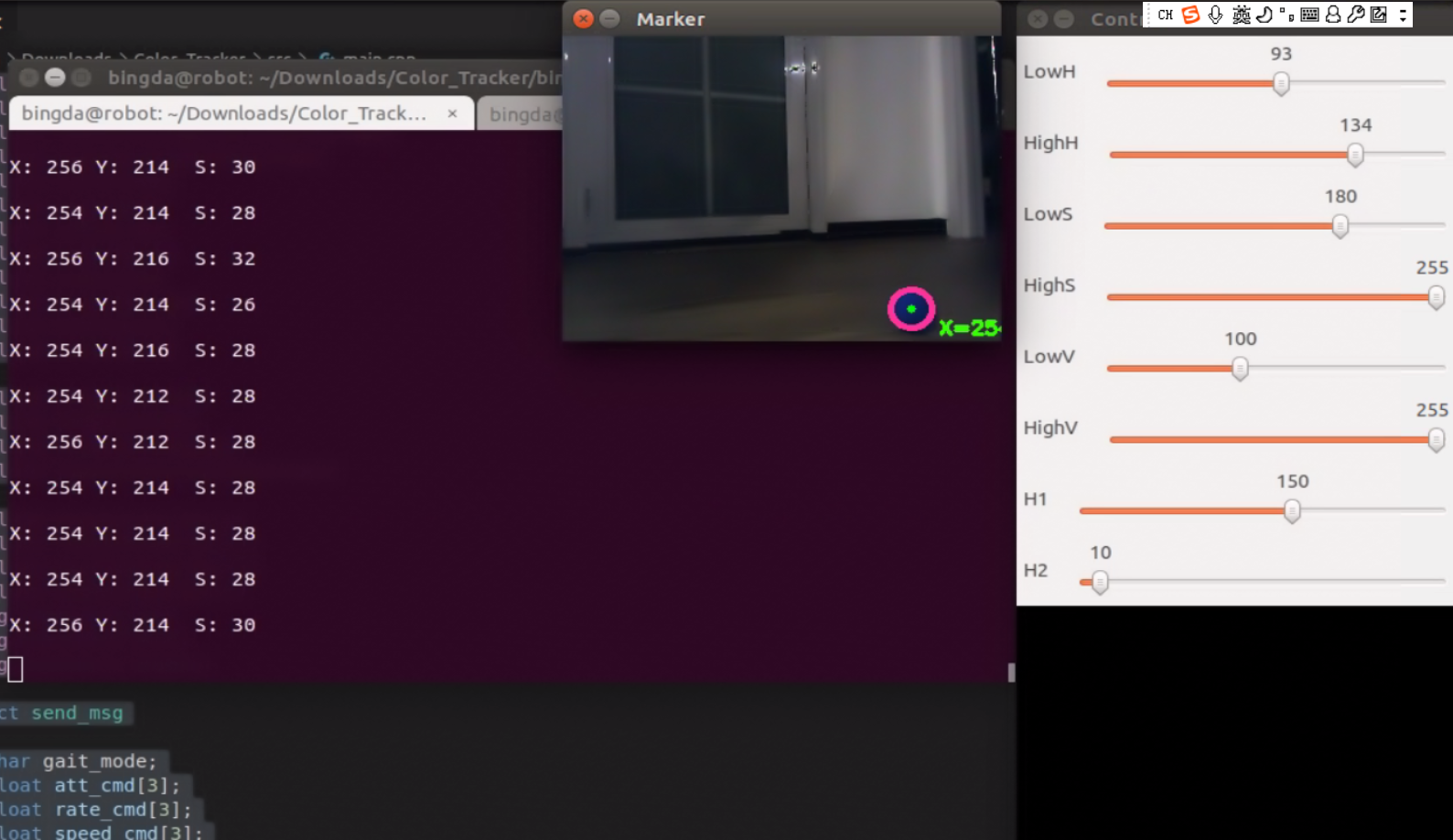
蓝色小球识别结果
则通过识别可以得到不同色块在图像中的位置与尺寸,在识别出色块后进一步采用霍夫变换实现对圆的拟合,提取和圆相近似的色块区域,设置H1和H2参数能剔除不同尺寸的小球,并要求圆形更精确的识别结果:
HoughCircles(contours, circles, CV_HOUGH_GRADIENT, 1, H1, 170, H2, 0, 255);
在识别出小球的中心和尺寸后我们通过下发机器人线速度、转向速度和姿态完成对小球的追踪,下列接口中att0为俯仰轴att1为横滚轴单位为度, rate2为转向速度单位为度每秒,speed0为X速度speed1为Y速度单位为米每秒:
struct send_msg
{
char gait_mode;
float att_cmd[3];
float rate_cmd[3];
float speed_cmd[3];
float pos_cmd[3];
} _send_msg;通过小球尺寸完成对前后速度的控制,我们设置一个期望小球尺寸大小tar_pix,并采用其误差结果构建简单的P控制器。
进一步采用Y轴误差完成对机器人俯仰角度的调节保证机器人一直“看着”小球,同理采用X轴误差完成对转向速度的调节,该控制量会产生一定权重用于产生侧向速度值:
int tar_pix=25;
int err_pix=(tar_pix-Target_Pix.z);
if(err_pix>10)err_pix=10;
if(err_pix<-10)err_pix=-10;
_send_msg.gait_mode=1;
_send_msg.speed_cmd[0]=err_pix*0.022*flt_cmd+(1-flt_cmd)*_send_msg.speed_cmd[0];
err_pix=(160-Target_Pix.x);
if(err_pix>25)err_pix=25;
if(err_pix<-25)err_pix=-25;
if(fabs(err_pix)<3)err_pix=0;
_send_msg.rate_cmd[2]=err_pix*0.003*10*flt_cmd+(1-flt_cmd)*_send_msg.rate_cmd[2];
_send_msg.speed_cmd[1]=err_pix*0.0025*flt_cmd+(1-flt_cmd)*_send_msg.speed_cmd[1];
err_pix=(120-Target_Pix.y);
if(err_pix>8)err_pix=8;
if(err_pix<-8)err_pix=-8;
if(fabs(err_pix)<3)err_pix=0;
_send_msg.att_cmd[0]=err_pix*0.1*10*flt_att+(1-flt_att)*_send_msg.att_cmd[0];为避免识别结果跳动带来的抖动,通过增加滤波平滑识别结果,产生更流畅的跟踪效果,最终将控制指令采用UDP接口基于SDK设定下发到机器人中,最终部署在Tinymal-B上的效果如下,视频中处理器为Jetson Nano,相机为奥比中光Mini深度相机:
如上所述。识别小球实际类似RM比赛中队装甲识别与打击,更复杂的处理可以增加KF滤波器实现对小球位置的预测,增强识别连续性,进一步跟踪小球采用全局位置规划,将所有识别结果均转换为XY物理坐标,在地图上完成跟踪轨迹的规划:
https://blog.csdn.net/weixin_46214675/article/details/115407820
https://zhuanlan.zhihu.com/p/416449365
项目代码:
- 代码如下:
#include <opencv2/highgui/highgui.hpp>
#include <opencv2/highgui/highgui_c.h>
#include <opencv2/imgproc/imgproc.hpp>
#include <opencv2/core/core.hpp>
#include <iostream>
#include <sstream>
#include <stdio.h>
#include <unistd.h>
#include <stdio.h>
#include <sys/time.h>
#include <string.h>
#include <unistd.h>
#include <Eigen/Dense>
#include <Eigen/Core>
#include <Eigen/Geometry>
#include <opencv2/core/eigen.hpp>
#include <sys/types.h>
#include <sys/socket.h>
#include <netinet/in.h>
#include <arpa/inet.h>
using namespace cv;
using namespace std;
using namespace Eigen;
struct send_msg
{
char gait_mode;
float att_cmd[3];
float rate_cmd[3];
float speed_cmd[3];
float pos_cmd[3];
} _send_msg;
Point3f Target_Pix,Target_Pos,Target_Att;
int Target_check_num=0;
int main()
{
VideoCapture cap;
cap.open(-1);
cv::Size InImage_size(320,240);
ostringstream ostr_pos;
ostringstream ostr_att;
int iLowH = 93;
int iHighH = 134;
int iLowS = 180;
int iHighS = 255;
int iLowV = 100;
int iHighV = 255;
int H1 = 150;
int H2 = 10;
namedWindow("Control", CV_WINDOW_AUTOSIZE);
cvCreateTrackbar("LowH", "Control", &iLowH, 179); //Hue (0 - 179)
cvCreateTrackbar("HighH", "Control", &iHighH, 179);
cvCreateTrackbar("LowS", "Control", &iLowS, 255); //Saturation (0 - 255)
cvCreateTrackbar("HighS", "Control", &iHighS, 255);
cvCreateTrackbar("LowV", "Control", &iLowV, 255); //Value (0 - 255)
cvCreateTrackbar("HighV", "Control", &iHighV, 255);
cvCreateTrackbar("H1", "Control", &H1, 255); //Value (0 - 255)
cvCreateTrackbar("H2", "Control", &H2, 255);
//----------------------UDP init----------------------------
int SERV_PORT= 8888;
int sock_fd;
sock_fd = socket(AF_INET, SOCK_DGRAM, 0);
if(sock_fd < 0)
{
exit(1);
}
struct sockaddr_in addr_serv;
int len;
memset(&addr_serv, 0, sizeof(addr_serv));
addr_serv.sin_family = AF_INET;
string UDP_IP="192.168.1.106";
addr_serv.sin_addr.s_addr = inet_addr(UDP_IP.c_str());
addr_serv.sin_port = htons(SERV_PORT);
len = sizeof(addr_serv);
printf("UPD Tinymal-ROS CV Port Open Suess!!");
int recv_num=0,send_num=0;
char send_buf[1024*100]={0},recv_buf[1024*10]={0};
while (1)
{
Mat frame;
cap >> frame;
if(!frame.empty()){
resize(frame, frame, InImage_size);
//flip(frame, frame, -1);
}
else{
cout<<"Camera Fail!!"<<endl;
return 0;
}
float alpha=4,beta=1.0;
for(int i=0;i<frame.rows;i++)
for (int j = 0; j < frame.cols; j++) {
for (int k = 0; k < 3; k++) {
int tmp= (uchar)frame.at<Vec3b>(i, j)[k] * alpha + beta;
if (tmp > 255)
frame.at<Vec3b>(i, j)[k] = 2 * 255 - tmp;
else
frame.at<Vec3b>(i, j)[k] = tmp;
}
}
Target_check_num=0;
Mat imgHSV;
vector<Mat> hsvSplit;
cvtColor(frame, imgHSV, COLOR_BGR2HSV);
split(imgHSV, hsvSplit);
equalizeHist(hsvSplit[2],hsvSplit[2]);
merge(hsvSplit,imgHSV);
Mat imgThresholded;
inRange(imgHSV, Scalar(iLowH, iLowS, iLowV), Scalar(iHighH, iHighS, iHighV), imgThresholded); //Threshold the image
Mat element = getStructuringElement(MORPH_RECT, Size(5, 5));
morphologyEx(imgThresholded, imgThresholded, MORPH_OPEN, element);
morphologyEx(imgThresholded, imgThresholded, MORPH_CLOSE, element);
imshow("Control", imgThresholded); //show the thresholded image
Mat edges;
Mat contours;
vector<Vec3f> circles;
//cvtColor(imgThresholded, edges, CV_BGR2GRAY);
Canny(imgThresholded, contours, 125, 350);
threshold(contours, contours, 128, 255, THRESH_BINARY);
//imshow("contours", contours);
HoughCircles(contours, circles, CV_HOUGH_GRADIENT,
1, H1, 170, H2, 0, 255);
for (size_t i = 0; i < circles.size(); i++)
{
Target_check_num=circles.size();
Point center(cvRound(circles[i][0]), cvRound(circles[i][1]));
int radius = cvRound(circles[i][2]);
Target_Pix.x=center.x;
Target_Pix.y=center.y;
Target_Pix.z=radius*2;
circle(frame, center, 3, Scalar(0, 255, 0), -1, 8, 0);
circle(frame, center, radius, Scalar(155, 50, 255), 3, 8, 0);
cout<<"X: "<<Target_Pix.x<<" Y: "<<Target_Pix.y<<" "<<" S: "<<Target_Pix.z<<endl;
cout<<endl;
}
if(Target_check_num){
ostr_pos.clear();
ostr_pos.str("");
ostr_pos << "X=" << (int)Target_Pix.x << " Y=" << (int)Target_Pix.y<< " Z=" << (int)Target_Pix.z;
putText(frame, ostr_pos.str(), Point(Target_Pix.x+20, Target_Pix.y+20),
CV_FONT_HERSHEY_SIMPLEX, 0.5, CV_RGB(55, 255, 0), 2);
}
imshow("Marker", frame);
//Control
float flt_cmd=0.05;
float flt_att=0.025;
if(Target_check_num==1){
int tar_pix=25;
int err_pix=(tar_pix-Target_Pix.z);
if(err_pix>10)err_pix=10;
if(err_pix<-10)err_pix=-10;
_send_msg.gait_mode=1;
_send_msg.speed_cmd[0]=err_pix*0.022*flt_cmd+(1-flt_cmd)*_send_msg.speed_cmd[0];
err_pix=(160-Target_Pix.x);
if(err_pix>25)err_pix=25;
if(err_pix<-25)err_pix=-25;
if(fabs(err_pix)<3)err_pix=0;
_send_msg.rate_cmd[2]=err_pix*0.003*10*flt_cmd+(1-flt_cmd)*_send_msg.rate_cmd[2];
_send_msg.speed_cmd[1]=err_pix*0.0025*flt_cmd+(1-flt_cmd)*_send_msg.speed_cmd[1];
err_pix=(120-Target_Pix.y);
if(err_pix>8)err_pix=8;
if(err_pix<-8)err_pix=-8;
if(fabs(err_pix)<3)err_pix=0;
_send_msg.att_cmd[0]=err_pix*0.1*10*flt_att+(1-flt_att)*_send_msg.att_cmd[0];
if(_send_msg.att_cmd[0]>10) _send_msg.att_cmd[0]=10;
if(_send_msg.att_cmd[0]<-10) _send_msg.att_cmd[0]=-10;
}else{
_send_msg.speed_cmd[0]=0*flt_cmd+(1-flt_cmd)*_send_msg.speed_cmd[0];
_send_msg.speed_cmd[1]=0*flt_cmd+(1-flt_cmd)*_send_msg.speed_cmd[1];
_send_msg.rate_cmd[2]=0*flt_cmd+(1-flt_cmd)*_send_msg.rate_cmd[2];
_send_msg.att_cmd[0]=0*flt_att+(1-flt_att)*_send_msg.att_cmd[0];
}
//UDP Send
memcpy(send_buf,&_send_msg,sizeof(_send_msg));
send_num = sendto(sock_fd, send_buf, sizeof(_send_msg), MSG_DONTWAIT, (struct sockaddr *)&addr_serv,len);
recv_num = recvfrom(sock_fd, recv_buf, sizeof(recv_buf), MSG_DONTWAIT, (struct sockaddr *)&addr_serv, (socklen_t *)&len);
if(recv_num <= 0)
{
}
else{//接收机器人底盘 里程计等数据
//解码
//memcpy(&_recv_msg,recv_buf,sizeof(_recv_msg));
}
char c = (char)waitKey(20);
if( c == 27 )
break;
}
}
- Cmakelist脚本:
cmake_minimum_required(VERSION 2.6)
SET(PROJECT_NAME run)
PROJECT(${PROJECT_NAME})
set( CMAKE_BUILD_TYPE "Release" )
set( CMAKE_CXX_FLAGS "-std=c++11 -O3" )
set(CMAKE_PREFIX_PATH ${CMAKE_PREFIX_PATH} "/usr/local/share/OpenCV")
set(EXECUTABLE_OUTPUT_PATH ${PROJECT_BINARY_DIR}/../bin)
find_package(OpenCV REQUIRED)
message(STATUS " version: ${OpenCV_VERSION}")
set(ARUCO_PATH /usr/local)
SET(CMAKE_MODULE_PATH ${ARUCO_PATH}/lib/cmake )
include_directories(
${OpenCV_INCLUDE_DIRS}
"./src/include"
"./build"
"/usr/include/eigen3/"
"/usr/local/include"
)
AUX_SOURCE_DIRECTORY(src DIR_SRCS)
ADD_EXECUTABLE(${PROJECT_NAME} ${DIR_SRCS})
TARGET_LINK_LIBRARIES(${PROJECT_NAME} ${OpenCV_LIBS})

