1 推荐的机器人SLAM设备配置
Tinymal-B SLAM基本教程采用Nivida原生的JetsonNano 4G版本(非国产版本),即采用DC头输入,这样才能直接使用我们的镜像,另外由于默认镜像无法压缩需要准备128G的SD卡,下载度盘原始镜像(解压后64G),下载到TF卡中,则启动后系统就安装好了ROS和YoloV5,可直接运行测试我们各教程中的提供Launch(默认部分launch相比教程可能进行了合并具体请自行查看),另外也建议同步更新最新的SLAM感知教程相关代码:
链接:https://pan.baidu.com/s/1s7WxpQMY6zCEZ5eJwFFZsg
提取码:rlt6
用户名:bingda
密码:bingda下面为默认的SLAM ROS代码,包括了MOCO_ROS即四足机器人的SDK节点,反馈机器人状态下发机器人速度和步态,另外还有其他雷达和视觉导航源码:
链接:https://pan.baidu.com/s/1WJcIK6jrQ-U2o3VUHI6pfA
提取码:876x
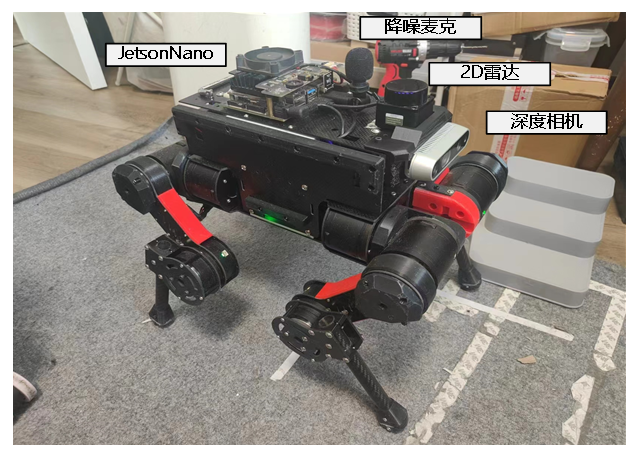
--来自百度网盘超级会员V3的分享Tinymal-B目前完整的感知配置包括了语音识别、雷达建图、深度视觉以及语音输出,基本配置推荐安装方式如下图所示。Jetson作为SLAM计算单元采用铜柱支撑在顶板对应安装孔,并拆除机头上的把手,安装对应的雷达相机打印件,采用独立的降噪麦克提供语音识别效果,目前采用的相机为RealsenseD435,如果需要跟换可以下载头部固定模组文件修改:

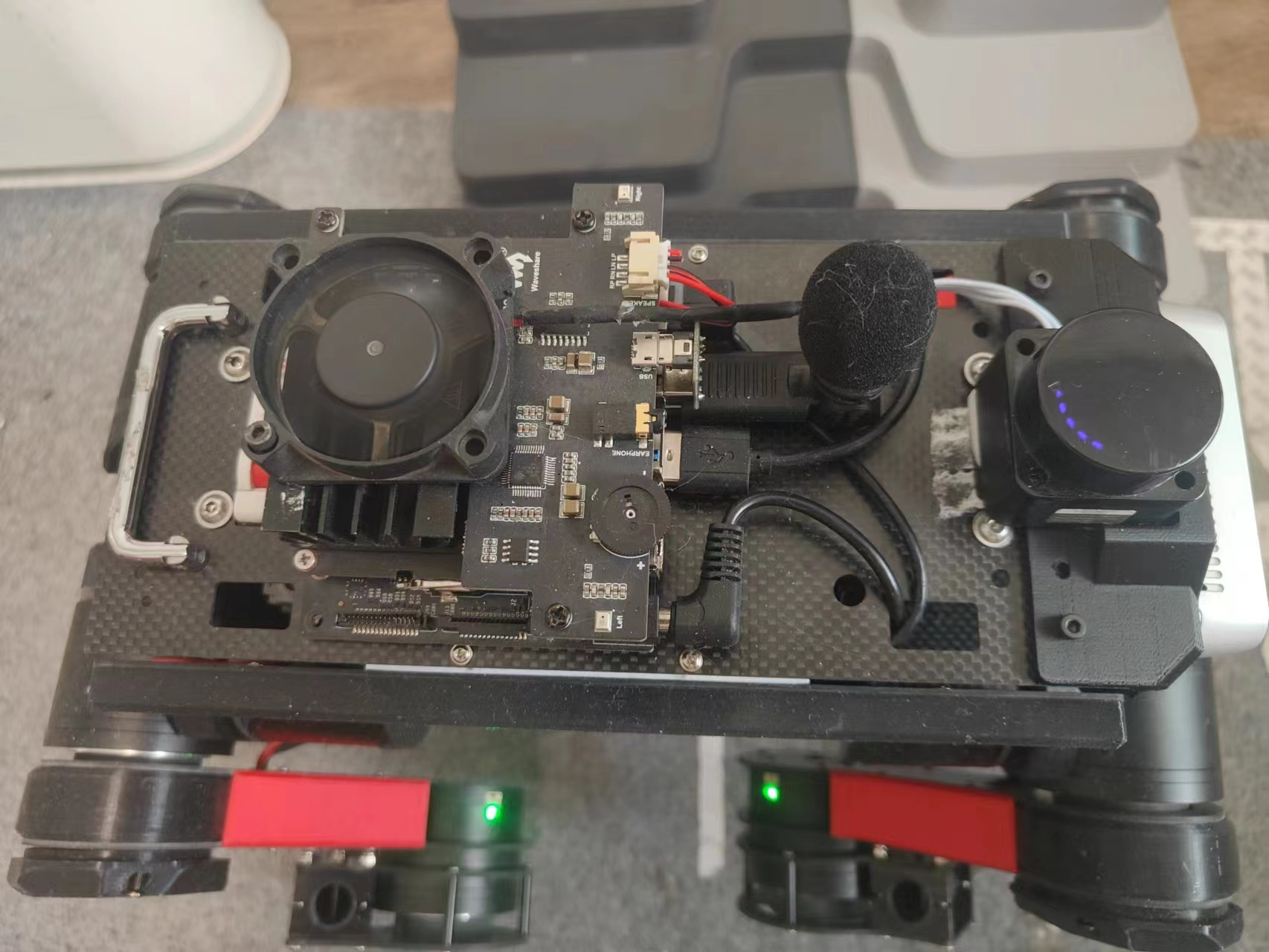
推荐的连线方式,尽量将大部分线缆从机器人内部引出
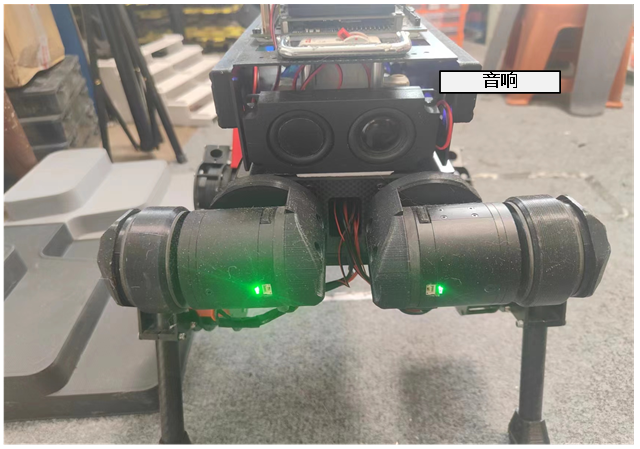
尾部采用了语音识别模块自带的麦克,将另外一个声道减去仅保留一个
上面采用的模组如下:
| 项目 | 链接 | 属性 |
| 降噪麦克 | https://detail.tmall.com/item.htm?id=641984796256&spm=a1z09.2.0.0.e2eb2e8dL7CHrW&_u=g1klsj89830c | 颜色分类:升级款 BY-M100UA【USB电脑笔记本设备专用】套餐名称:官方标配 |
| 语音模组 | https://detail.tmall.com/item.htm?id=651969946419&spm=a1z09.2.0.0.e2eb2e8dL7CHrW&_u=g1klsj899a1d | |
| JetsonNano | https://detail.tmall.com/item.htm?ali_refid=a3_430582_1006:1678388859:N:v2O66a8DU7qKn6EYlH26bTps63UxR1gU:ae0a054106eb0e99bf74147c55737212&ali_trackid=1_ae0a054106eb0e99bf74147c55737212&id=678044952260&spm=a230r.1.14.1&skuId=4877021805094 | 颜色分类:Jetson Nano 4G 开发套件 B01官方原版 |
| Realsense | https://detail.tmall.com/item.htm?_u=g1klsj89f17f&id=562034767129&spm=a1z09.2.0.0.e2eb2e8dL7CHrW | 可替换奥比中光https://item.taobao.com/item.htm?spm=a1z09.2.0.0.e2eb2e8dL7CHrW&id=629234396654&_u=g1klsj89c690 |
| 2D雷达 | https://item.taobao.com/item.htm?spm=a1z09.2.0.0.e2eb2e8dL7CHrW&id=674031870991&_u=g1klsj898bec | LD06激光雷达[+串口转接板] |
| 降压模块 | https://item.taobao.com/item.htm?spm=a1z09.2.0.0.e2eb2e8dL7CHrW&id=601763884843&_u=g1klsj89c59b | 颜色分类:塑料外壳套装输出电压:5V输入电压:40V以内 |
| Type-C转接线 | https://detail.tmall.com/item.htm?_u=p1klsj894f7e&id=643736305835&spm=a1z09.2.0.0.3e7e2e8dchgJhd | 长度:0.2m颜色分类:【USB-A转C】黑色◆9芯线★USB3.1Gen2标准★10Gbps高速传输 |
2. 无遥控的自主任务与操控
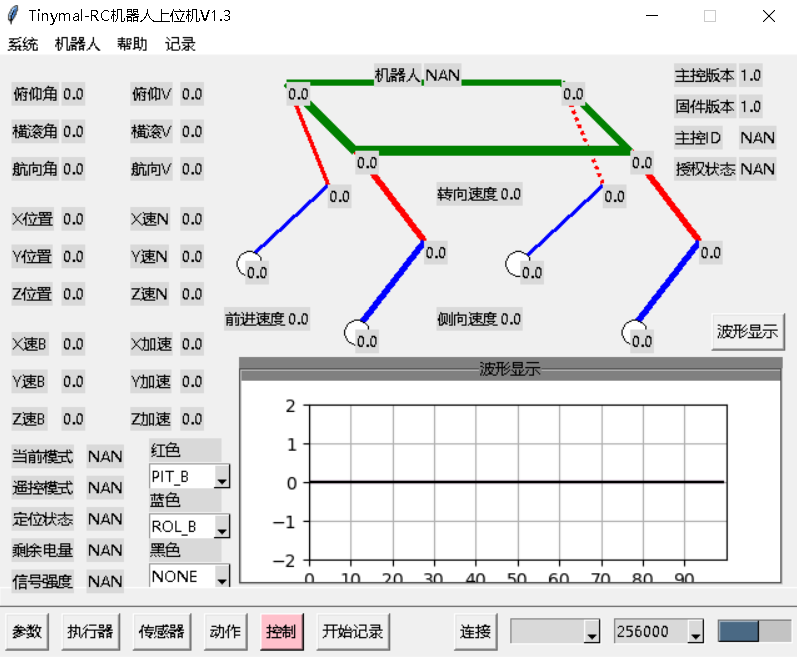
Tinymal默认为了调试默认需要采用PC连接手柄使用上位机完成遥控功能,因此主要面向于机器人开发和调试,操控Anymal本身的操控体系设计如下:
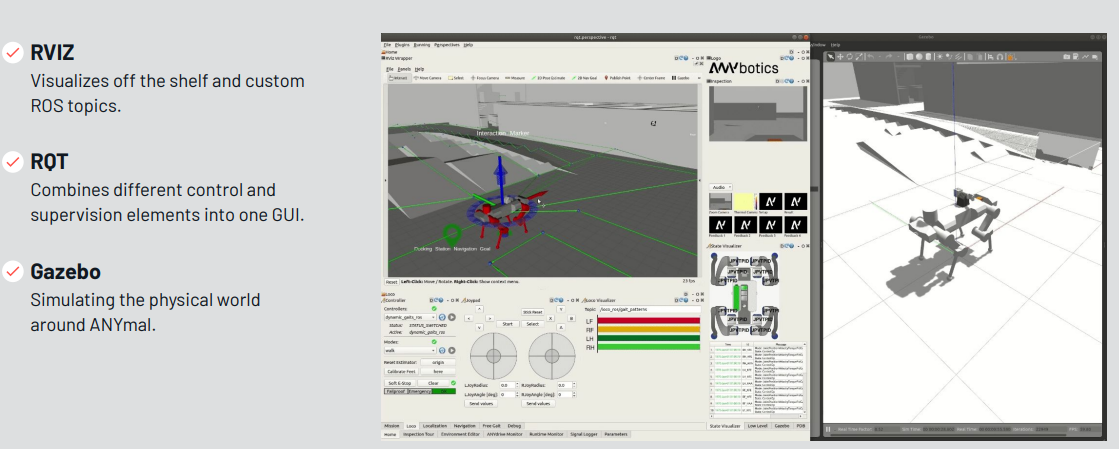
Anymal的自主操控框架
- 指令级上位机操
- 指令级无线遥控
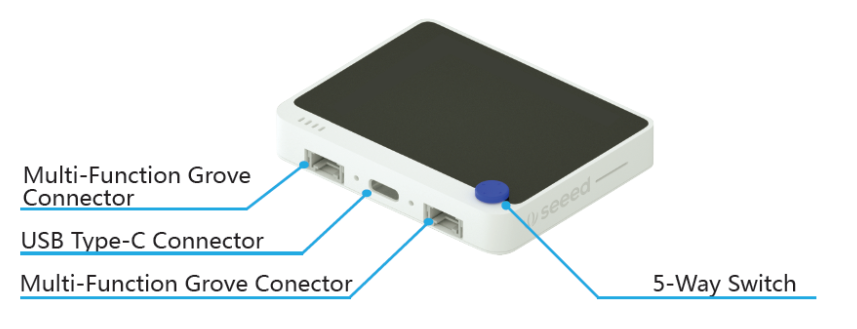
如果需要无线操控或者脱离PC一种方式是可以采用我们配套开源的Quad-Terminal操控终端,如果配套使用遥控底板则可以实现双摇杆操控,如果仅仅想实现机器人移动那也可以直接购买一个Wio-Terminal刷入我们的代码,采用自带的按键实现操控功能。
- 任务级控制台操控
当然我们还提供了完全面向任务级操控的方法,即不需要遥控器和上位机,完全采用机器人自主导航实现,该方法需要按我们的教程搭建完整的SLAM软硬件,则在启动地图、导航和可视化节点后,在PC本地首先可以采用虚拟摇杆实现机器人基本运动:
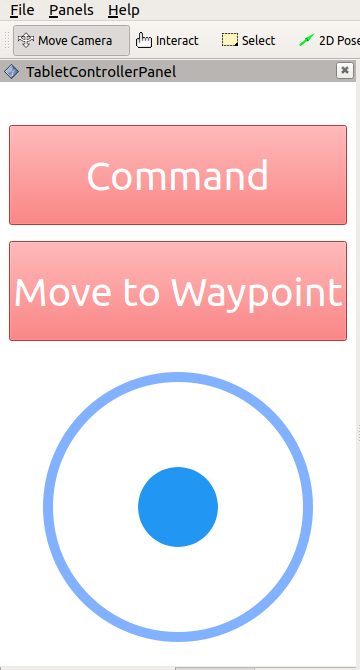
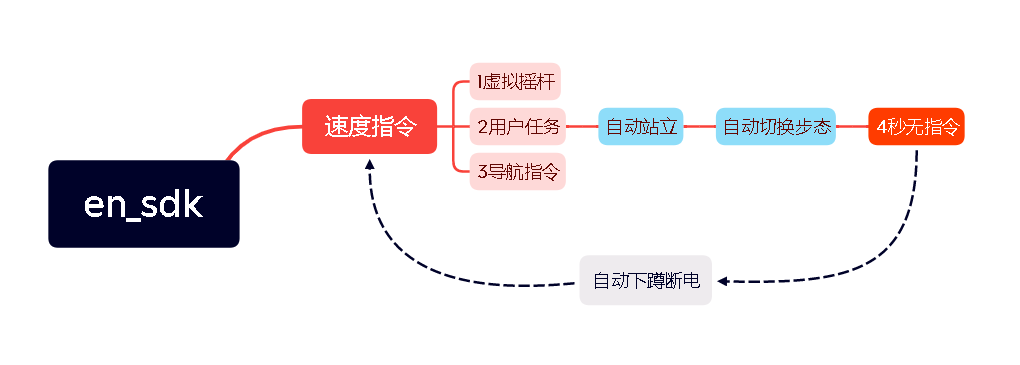
在Command中选择EN_SDK,则SLAM导航系统只要产生速度指令,机器人就会自动上电并自主切换步态按速度指令完成移动:
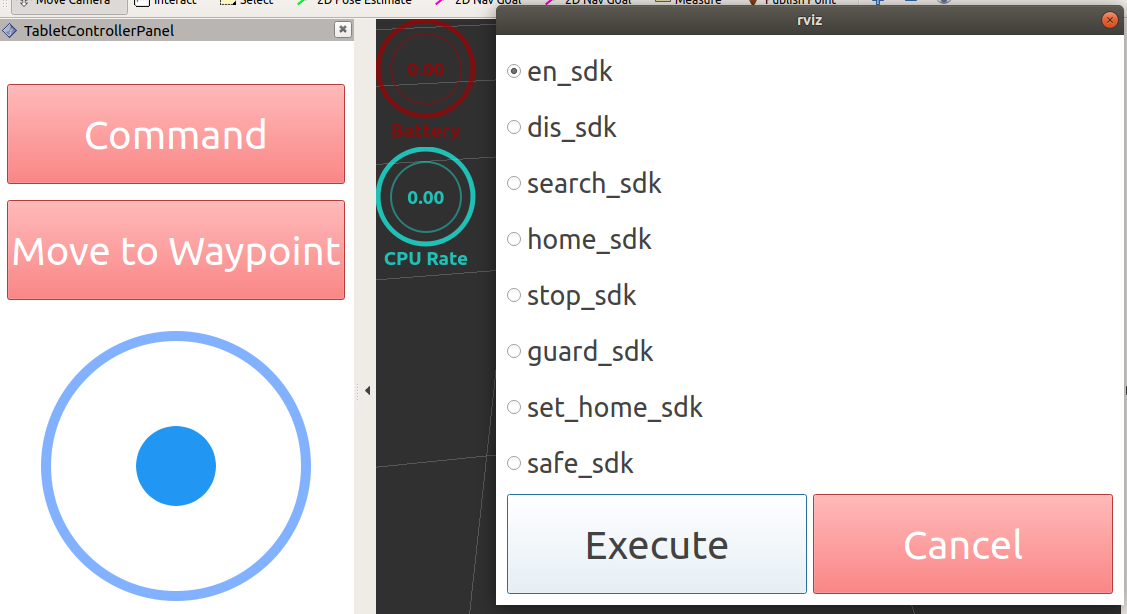
我们在SDK接口中设置了MUX速度指令混合操控的功能,其有3个优先级来订阅不同的速度指令,最高优先级就是虚拟摇杆、第二是用户使用SDK接口自己开发的任务(如我们的自主搜索猫的例子),最低以及就是move_base基于导航路点计算的速度指令,具体可以参考SLAM部分的相关教程,总而言之基于该模式可以完全面向比赛、自主任务来实现基于Rviz控制终端的任务级操控!