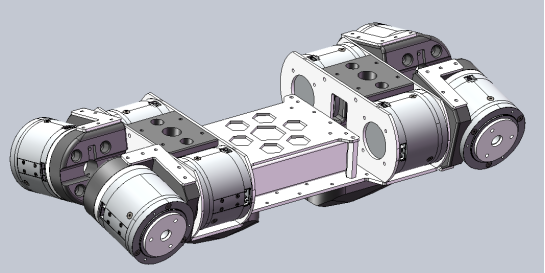
此步骤共需要4个电机,完成4个大腿模组的组装。在使用电机之前请自行DIY供电线,使用USB转接模块采用达妙提供的上位机完成对电机的标定与参数配置(详情参看附录1),4个电机CAN ID配置为1,电流环带宽为2000Hz,前后后侧模组组装后的整体造型如下所示:

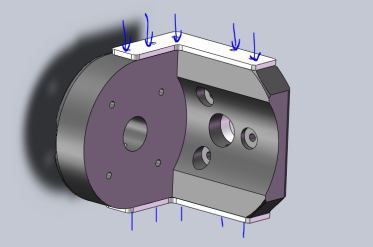
1)首先3D打印件安装加固碳板,采用M3*8自攻螺丝固定:
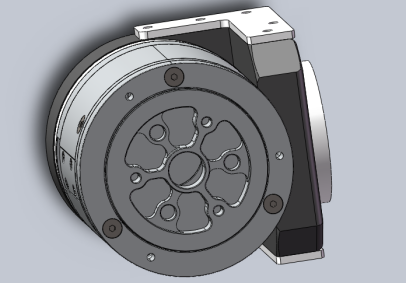
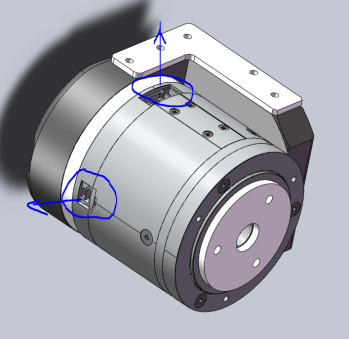
1)配合主机架上的侧展电机完成一体化安装,注意安装时需要在底座和侧展电机间加装垫片碳板垫片(5mm厚度的),采用M3*15 平头螺丝加上M3*D7垫片固定:
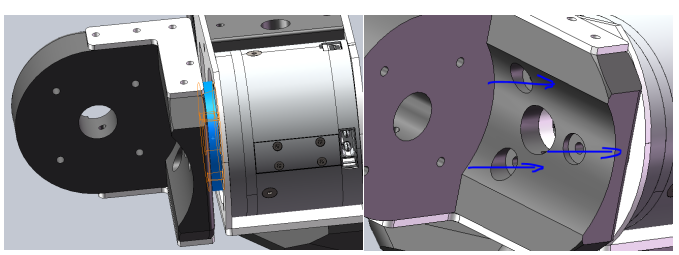
1)安装大腿电机,注意需要增加相应碳板垫片,采用M2.5*20螺丝加上M2.5*D7垫片固定:
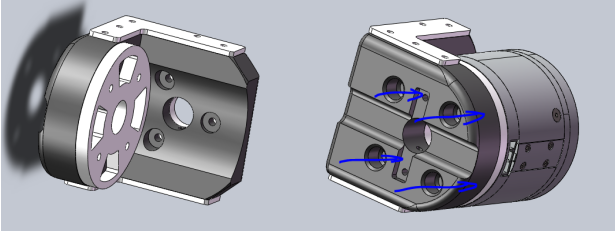
注:根据机器人版本和用户需求的不同,大腿电机供电口朝向可能不一样,我们推荐采用供电口朝上的方式,最终安装完4个大腿电机模组后效果为: