
至此我们完成了Tinymal-B桌面版的组装与简单测试,如果你对控制和感知开发感兴趣可以进一步查看《Tinymal-B桌面版控制开发》与《Tinymal-B桌面版感知开发》教程,如果您仅想使用Tinymal-B基础功能可以持续关注我们的固件更新,后续自主追踪、巡线、SLAM、人脸识别、跳舞互动、室内路点巡逻等功能将不断更新!!
附录1 达妙电机固件更新与配置
达妙电机固件更新请咨询其淘宝客服,采用上位机完成相应版本固件的更新,目前我们采用的版本是DM-J4310_V3121_01,调试助手 -V1.6.0.6-221123D(可找淘宝客服获取),注入更新固件后建议重新完成电机的标定保证功能正常!
连接上位机后首先完成对电机的标定,读取参数完成对如下参数的修改:
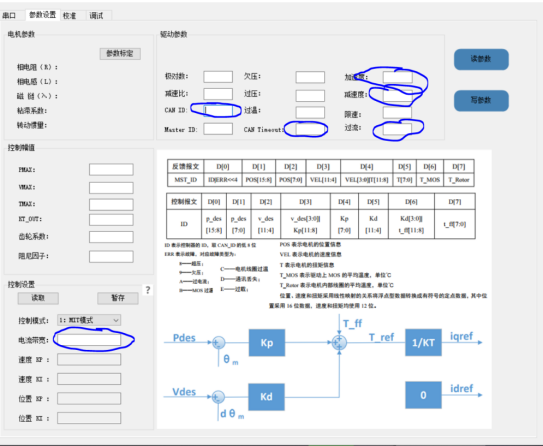
修改如下参数然后写入:加速度+10,减速度-10,CAN ID依据教程步骤修改,CAN TIMEOUT 2000,过流0.8,电流带宽2000,其余不修改。
附录2 HelloRobotic模块固件下载与更新
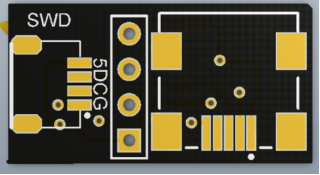
注:如果连接无反应主要可能是该转换板虚焊,可以自行进行重新加热焊接!
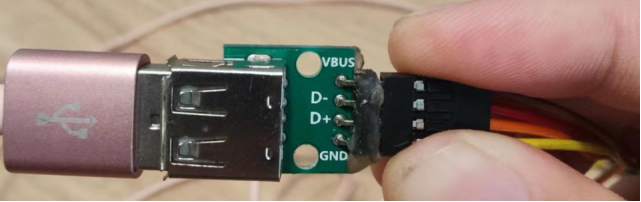
固件升级需要采用STlink,可以使用SWD转接模块连接,对下载器和USB的连续需要使用对应的转接板或者可以自行按引脚定义连线:
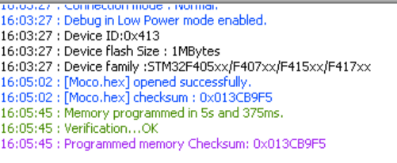
首先使用转接线与STlink的SWD接口对接并从下载口提供5V供电,之后使用STM32 ST-LINK Utility 下载固件。首先连接单片机,正确连接后显示:
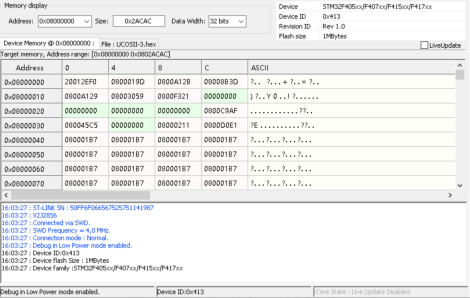
之后选择需要下载的固件,点击File选择Open File功能,找到对应版本hex固件确认:
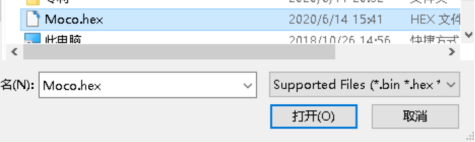
选择Target点击Program and Vertify下载固件:
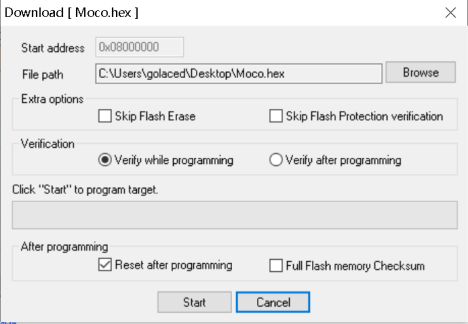
点击Start开始下载当读条完毕,并显示如下说明则固件下载完成:
备注(USB转接模块的连接):
下载器配套两个SWD下载转接模块,下载时连接主控SWD下载口:
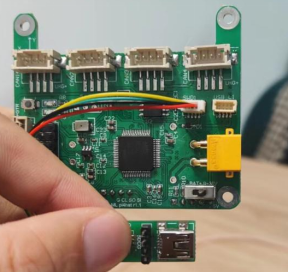
上图主控连接的SWD端子定义如下:
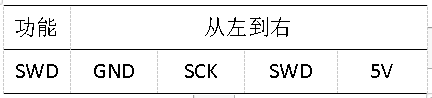
下载程序可以直接使用STlink连接小转接板上排针引脚,另外可以通过Micro USB口连接延长线到转接模块:
连接模块定义如下:

附录3 关节角度标定
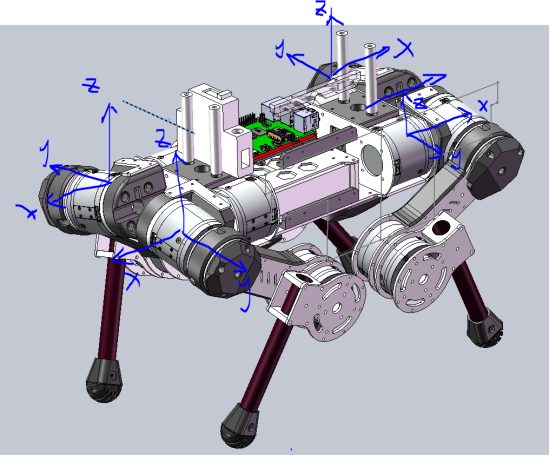
首先介绍下单腿的坐标系,下面给出几个角度示例,下面为大腿角度:
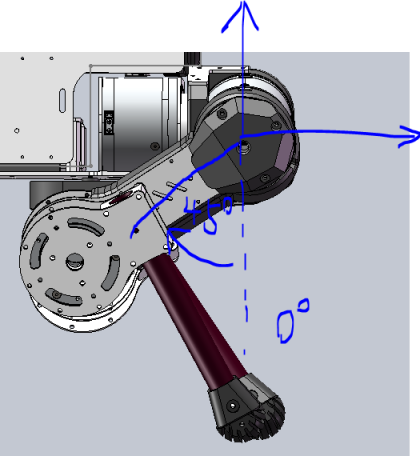
大腿坐标系定义,前后腿对称
下图为小腿角度:
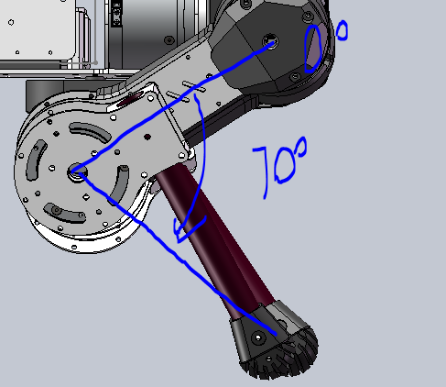
小腿坐标系定义各腿均一样
下面为侧展角度:
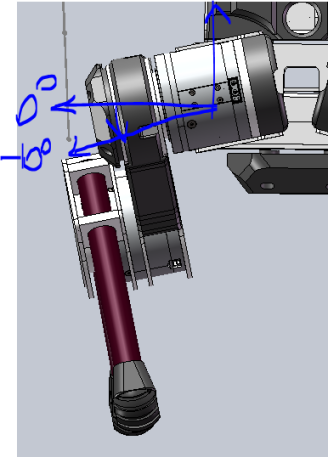
侧展坐标系左右腿不对称
我们所有腿都采用了相同的坐标系定义,因此并不像MIT那样具有一致的朝向,下图仅用于关节角度标定,最终控制上所采用的坐标系我们将在《控制开发》教程中介绍:
为了更好的描述整个标定过程,请参考我们的B站教程《Tinymal-B桌面版关节标定》!
附录4 迷你路由器配置
当你拿到Mini路由器后首先需要完成对其IP的配置,使用配套的USB线对其进行连接供电,连接路由器默认的WIFI,输入密码goodlife,之后打开浏览器输入192.168.8.1,登录管理界面,其密码为goodlife,首先修改配置:
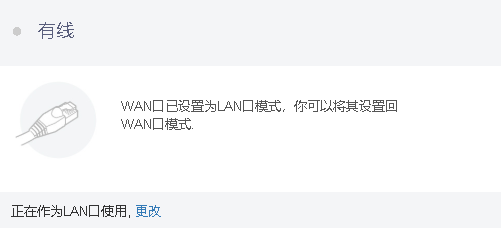
将路由器WAN口修改为LAN口:
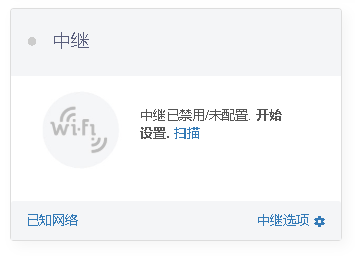
打开手机建立一个WIFI热点,使用路由器中继功能,这样以后就可以通过他连上网络更新系统:
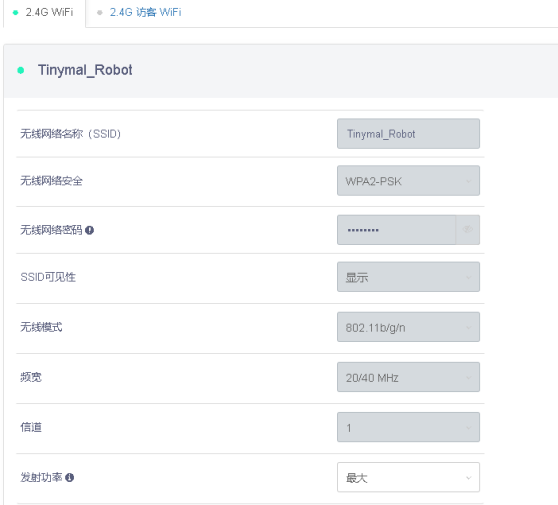
修改无线通讯SSID:
最终在更多设置中修改路由器IP为192.168.1.1:


