
- Tinymal室内结合物品语义SLAM的YoloV5识别例程:
链接:https://pan.baidu.com/s/1VbA2Y208DP3qXfJeXZ74hQ
提取码:qudk
--来自百度网盘超级会员V3的分享本项目完成对室内目标的识别特别是对猫咪的识别,同时基于深度地图数据完成对目标位置的全局估计,发布Box、物品名称绘制于地图。
- Tinymal 语音识别ChatGPT聊天机器人资料:
链接:https://pan.baidu.com/s/1l3Jl2eh3RRU4JQ2aFl1jfQ
提取码:wqtp
--来自百度网盘超级会员V3的分享本项目完成基于热词唤醒,ChatGPT聊天与播报功能。
- Tinymal 机器人ROS下URDF下载(Gazebo仿真):
提供ROS下的URDF,可用于Gazebo仿真和RBDL动力学验证,坐标系定义可自行修改:
链接:https://pan.baidu.com/s/1hbE4BLajoHplAfgVIk8o6g
提取码:zywm
--来自百度网盘超级会员V3的分享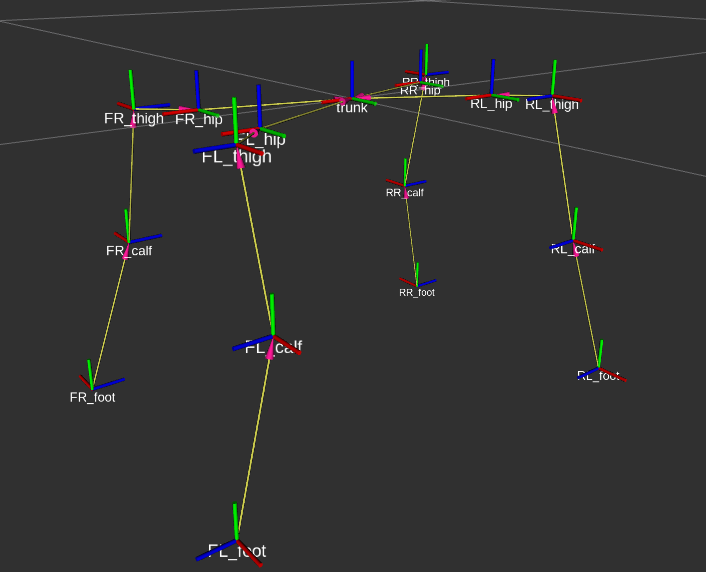
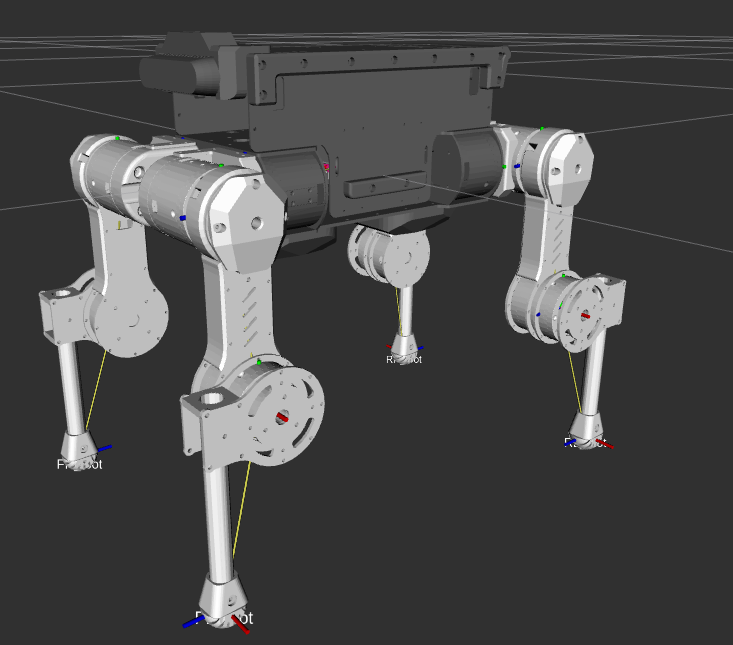
- Tinymal 机器人ROS下URDF下载(可视化):
提供ROS下的URDF,可用于Rviz可视化,目前尚不支持Rviz仿真,如有需要可以自行修改
链接:https://pan.baidu.com/s/1hdE77oepsulBuKOEWVLs8Q
提取码:uf5z
--来自百度网盘超级会员V3的分享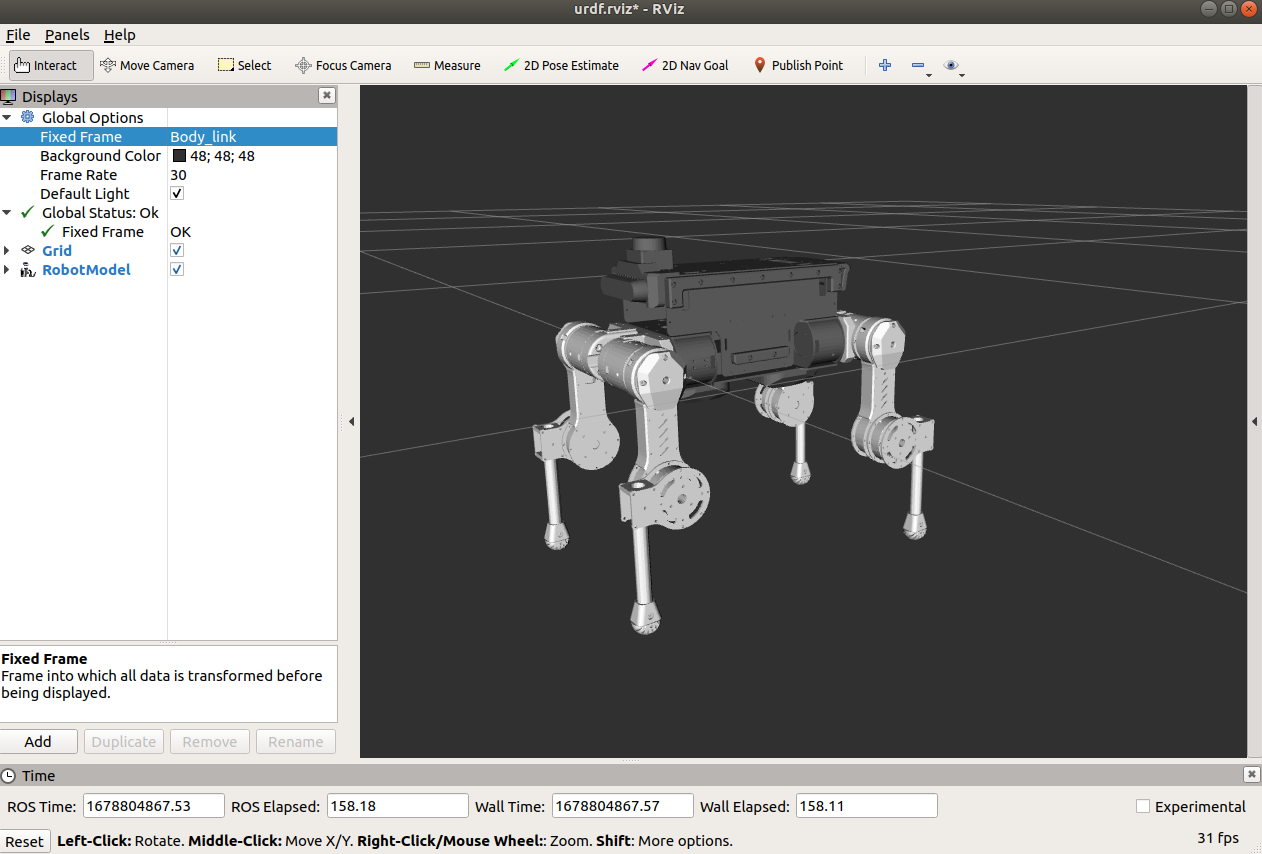
- Tinymal 原始ROS镜像:
提供Bingda的基本开源镜像,替换Catkin空间可完成基本的导航功能,注意需要自行参考之前的例程完成YoloV5等软件的安装,JetsonNano镜像如下:
链接:https://pan.baidu.com/s/1ZIJ1gfLvMudTEnVax1Qwdw
提取码:m3mx
--来自百度网盘超级会员V3的分享PC虚拟机镜像如下,建议开机前增加硬盘空间,并重新扩展分区:
链接:https://pan.baidu.com/s/1nm8XZ78e7nBMBX9ZlTf-WA
提取码:z49n
--来自百度网盘超级会员V3的分享
