
1 按键界面修改发布自定义话题
首先完成安装:
sudo apt-get install ros-melodic-jsk_rviz_plugins 官方教程:
完成下载:
打开/home/bingda/catkin_ws/src/jsk_visualization/jsk_rviz_plugins/src/tablet_controller_panel.cpp在对应代码处增加按键指令:
void TabletControllerPanel::taskButtonClicked(){
task_dialog_ = new QDialog();
task_dialog_->setBackgroundRole(QPalette::Base);
task_dialog_->setAutoFillBackground(true);
task_dialog_layout_ = new QVBoxLayout();
task_radio_buttons_.clear();
std::vector<std::string> tasks;
tasks.push_back("en_sdk");
tasks.push_back("dis_sdk");
tasks.push_back("search_sdk");
tasks.push_back("home_sdk");
tasks.push_back("stop_sdk");
tasks.push_back("guard_sdk");
tasks.push_back("set_home_sdk");
tasks.push_back("safe_sdk");同时在头文件中增加发布的话题:
在按键选择回调函数中将获取的按键名称作为话题进行发布:
void TabletControllerPanel::taskExecuteClicked()
{
for (size_t i = 0; i < task_radio_buttons_.size(); i++) {
QRadioButton* radio = task_radio_buttons_[i];
if (radio->isChecked()) {
ros::NodeHandle nh;
std::string task = radio->text().toStdString();
ROS_INFO("task: %s", task.c_str());
task_dialog_->reject();
jsk_rviz_plugins::StringStamped command;
command.data = task;
command.header.stamp = ros::Time::now();
pub_start_demo_.publish(command);
std_msgs::Empty temp;
pub_sdk[0] = nh.advertise<std_msgs::Empty>(task.c_str(),1);
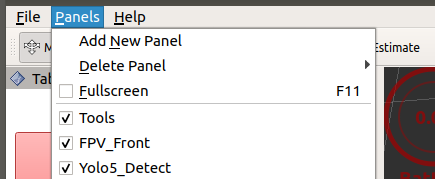
pub_sdk[0].publish(temp);修改完成后完成catkin_make,刷新插件,打开Rviz在Panels中插入TabletControllerPanel:
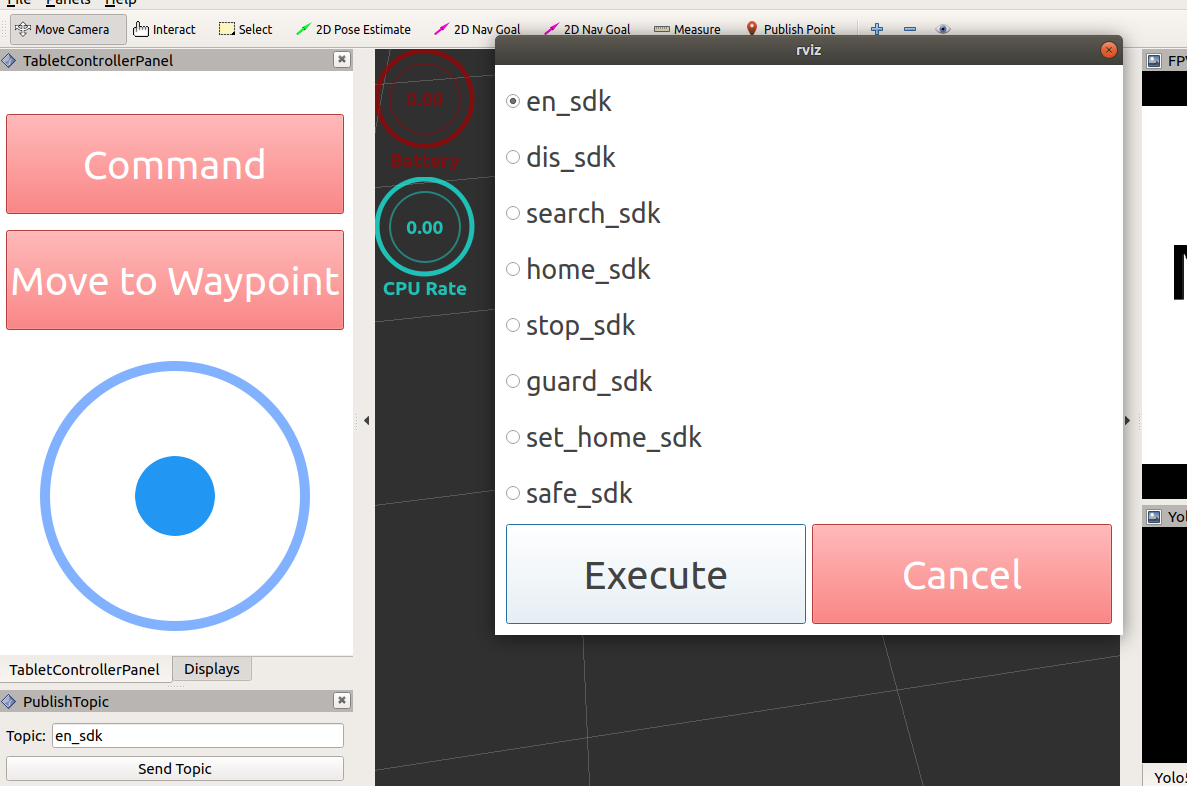
Command中选择指令执行则发布话题,该功能可以实现基本的按键和陌生切换
2 虚拟摇杆操控
TabletControllerPanel插件中自带了一个虚拟摇杆,其发布的话题可以在tablet_controller_panel.cpp修改safe_vel自己定义,则在拖动摇杆后会发布对应数据,但是停住不动并不会继续发布!
因此要使用该速度可以订阅:
ros::Subscriber sub_cmd4 = n.subscribe("/navigation/unsafe_vel", 10,callback1_rc);再回调函数中读取,由于刚才提到该摇杆仅响应拖动事件,持续维持在某行程并不会连续发生,因此可以对摇杆值进行缓存:
int rc_control_flag=0;
float rc_control_loss=0;
float rc_input_reg[3]={0};
void callback1_rc(const geometry_msgs::Twist& cmd_vel)//2 virual RC input
{
cmd_aux_flag[2]=1;
cmd_in_ot[2]=0;
ROS_INFO("ROS-RC Connect In");
ROS_INFO("Linear Components:[%f,%f,%f]",cmd_vel.linear.x,cmd_vel.linear.y,-cmd_vel.linear.z);
ROS_INFO("Angular Components:[%f,%f,%f]",cmd_vel.angular.x,cmd_vel.angular.y,-cmd_vel.angular.z);
rc_input_reg[0]=cmd_vel.linear.x;
rc_input_reg[1]=-cmd_vel.linear.y/2;
if(fabs(rc_input_reg[0])>0.01||fabs(rc_input_reg[1])>0.01)
rc_control_flag=1;
else if(rc_input_reg[0]==0&&rc_input_reg[1]==0)
rc_control_flag=0;
rc_control_loss=0;
set_spd_x(cmd_vel.linear.x);
set_spd_y(-cmd_vel.linear.y/2);
set_spd_yaw_rate(cmd_vel.angular.z*0);
if(!ros_connect){
moco_sdk.mode_ros=ros_connect=1;
ROS_INFO("ROS RC cmd/vel Connect In!");
}
ros_loss_cnt=0;
}通过标志位判断,在主函数中连续发送直达摇杆归零复位:
if(rc_control_flag==1){
rc_control_loss+=0.002;
set_spd_x(rc_input_reg[0]);
set_spd_y(rc_input_reg[1]);
set_spd_yaw_rate(0);
moco_sdk.mode_ros=ros_connect=1;
ros_loss_cnt=0;
if(rc_control_loss>2&&0){
ROS_INFO("ROS-RC Stop");
rc_control_flag=rc_control_loss=0;
}
}
