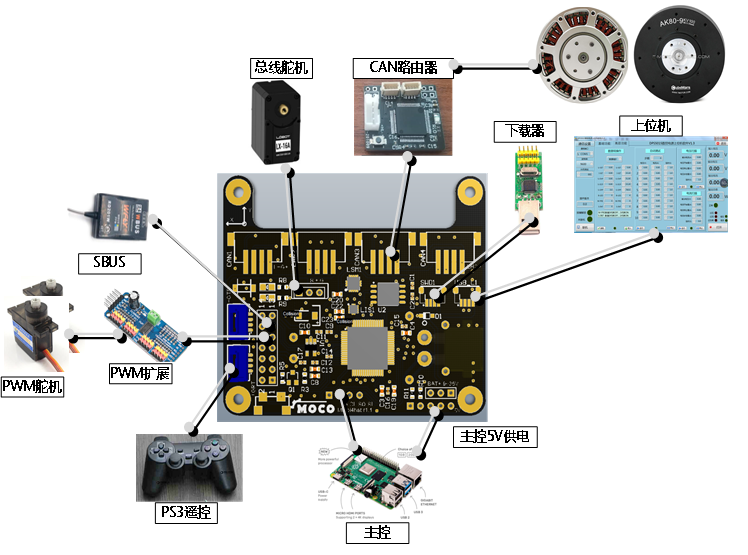
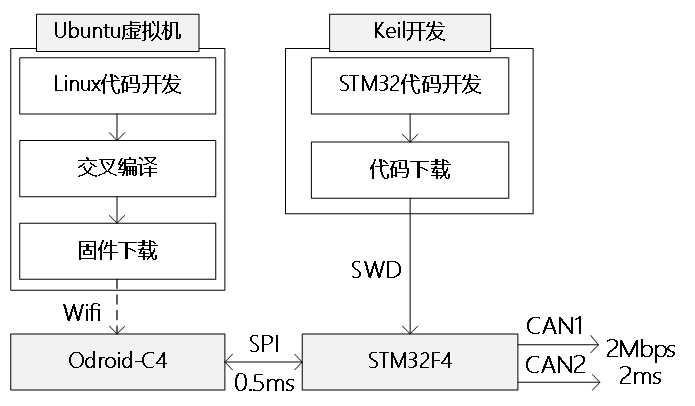
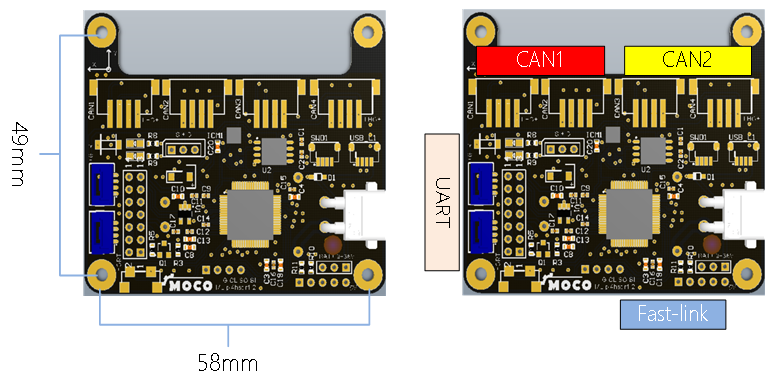
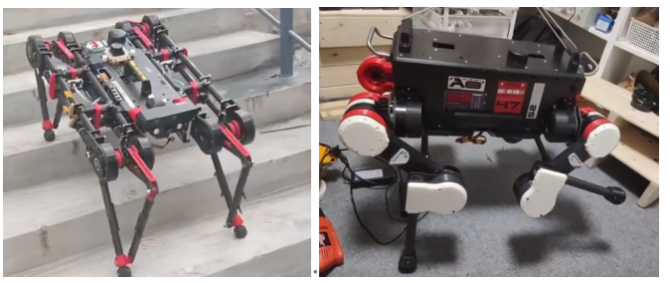
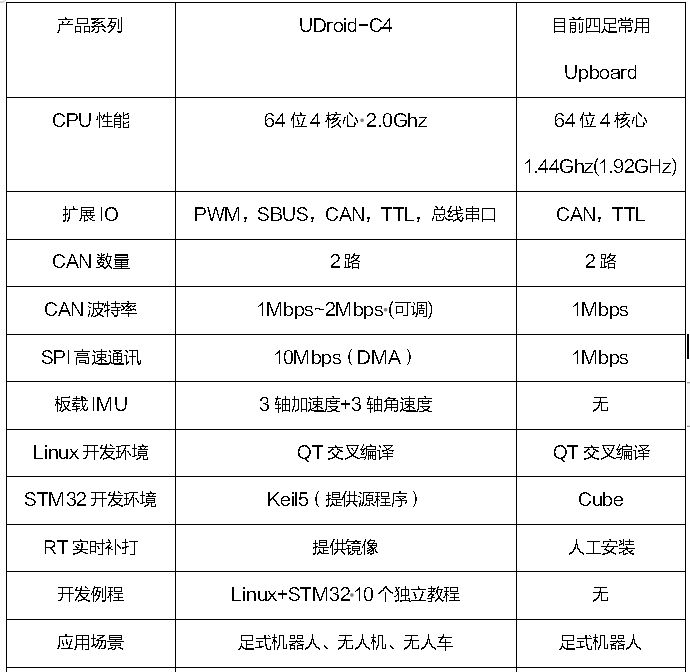
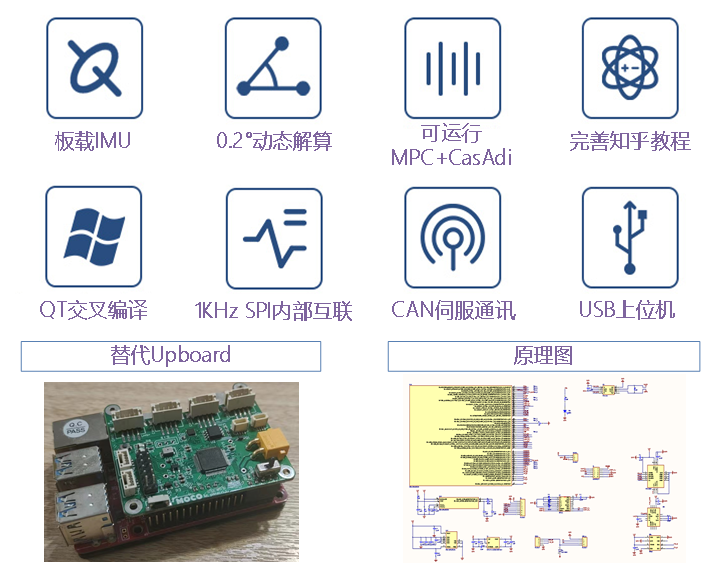
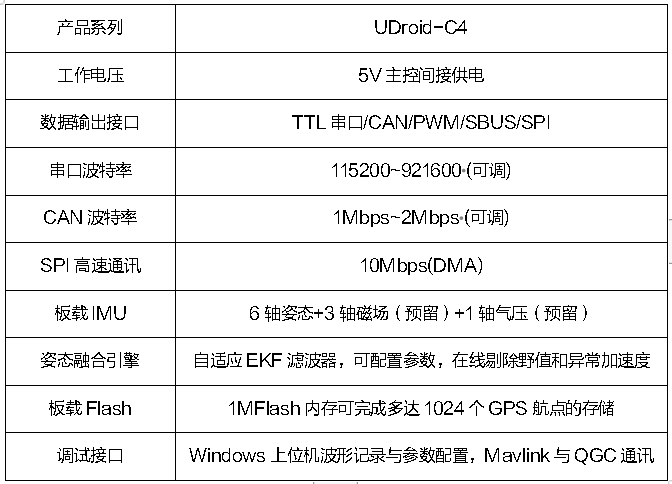
UDroid-C4是针对机器人运动控制开发的低成本RT实时运动控制计算单元,其采用Odroid-C4单板Linux作为主控,算力相比树莓派4B高出1倍,板载IMU内置自适应姿态融合模型,可实现高精度姿态解算保证足式机器人运动控制的可靠性。载板与主控采用SPI内部总线通讯基于DMA可实现us级数据同步与大容量传输,具备2路独立CAN通道和4路CAN IO接口,最高可实现2Mbps的数据通信,配合CAN-Adapter可以快速搭建4足、6足、双足机器人的运动控制硬件系统,UDroid-C4已经在Tinymal-B和幽灵蛛等多款四足机器人平台上长时间测试与使用:
(1)评测资料:
(2)下楼梯冲击:
(3)Bound连续冲击:
(4)Trot步态测试:
提供交叉编译工具、RT实时系统和运动控制工程模板,可实现STM32与Linux系统通过SPI实现数据交互,同时Linux搭建好多进程共享内存软件开发框架。