
1. 简介
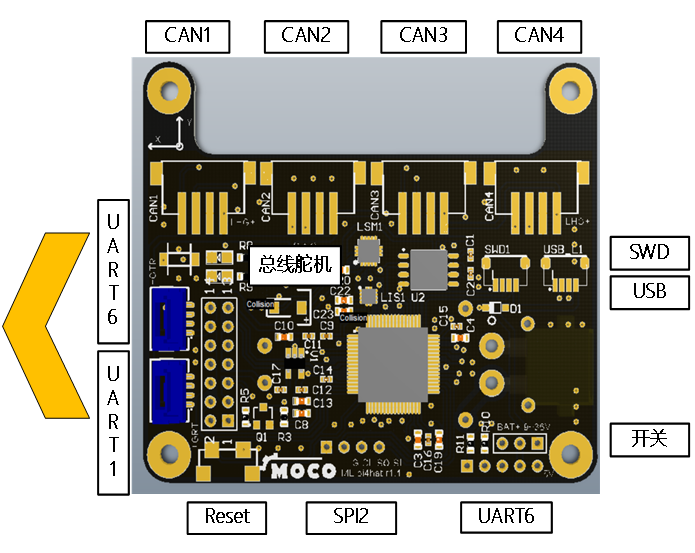
UDroid-Pihat是一个面向机器人, 高性能动控制的载板(提供安装好RT实时补打的镜像和安装教程),其采用STM32F4单片机作为主控制器,设计参考MIT Mini-Cheetha和Mjbot等方案,本项目提供了两个主要的固件模式。(A)主控模式:可以直接在控制器中编程完成运动控制开发,可作为STM32学习用的开发板;(B)载板模式:可作为如树莓派或Odroid的IO载板,采集传感器数据、计算控制指令,最终通过CAN总线发送出去,UDroid-Pihat如下图所示:
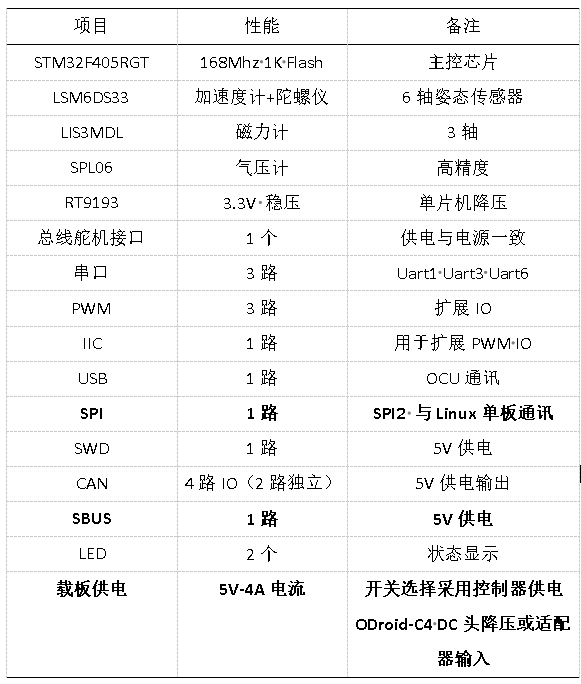
UDroid-Pihat具有面向机器人运动控制所需的扩展接口和传感器,板载9轴传感器和2路独立CAN总线、2路串口和外扩IO,载板硬件资源如下表所示:
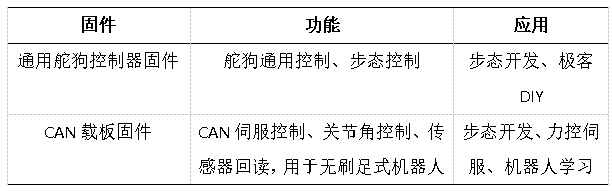
UDroid-Pihat支撑LIT Dynamics机器人系统的多种固件,一板多用能适合于舵狗DIY、无人机飞控、无刷机器人步态控制器、树莓派图像开发等,目前支持的典型固件如下:
2. 硬件引脚分配
目前单片机引脚已经完全分配,后续扩展模块通过串口内部高速通讯,目前预留的串口主要用于远程OCU连接、SDK输入与航模SBus遥控输入,扩展定位模块、树莓派SPI通讯。主控端子均朝向上方采用典型飞控的引脚分配使用2.54排针作为主伺服控制信号的输出,SWD与USB均采用1.25端子引出,方便不调试时去除连线,USB调试口配套对应连接转换板方便控制器内置时的参数调节,具体端子分布如下图所示
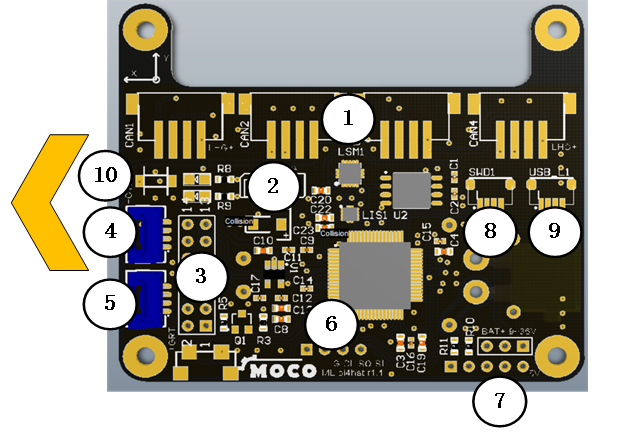
上图所示,端子①为四路CAN接口,2个CAN端子公用一路 CAN总线,从左到右分别为CAN1,CAN1,CAN2,CAN2对应的引脚说明如下:

如上图所示,端子②为总线舵机端子,对应的引脚说明如下:

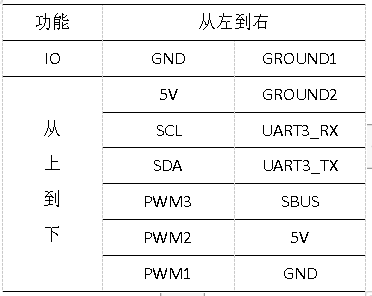
如上图所示,端子③为外扩引脚组对应的说明如下:
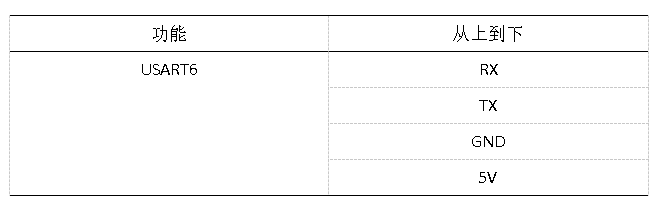
如上图所示,端子④为串口6引脚组对应的说明如下:
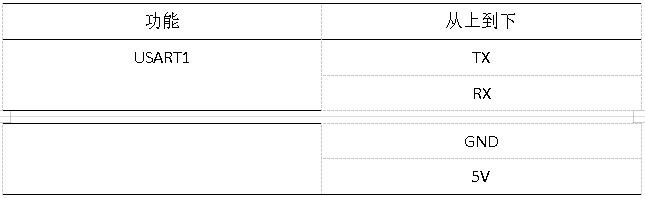
如上图所示,端子⑤为串口1,引脚组对应的说明如下:
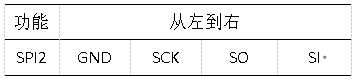
如上图所示,端子⑥为SPI2 树莓派 通讯引脚,引脚组对应的说明如下:
如上图所示,端子⑦为树莓派串口6,引脚组对应的说明如下:

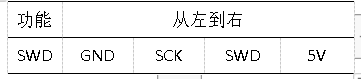
如上图所示,端子⑧为SWD下载引脚,引脚组对应的说明如下:
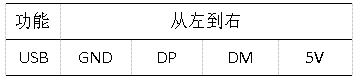
如上图所示,端子⑨为USB上位机配置引脚,引脚组对应的说明如下:
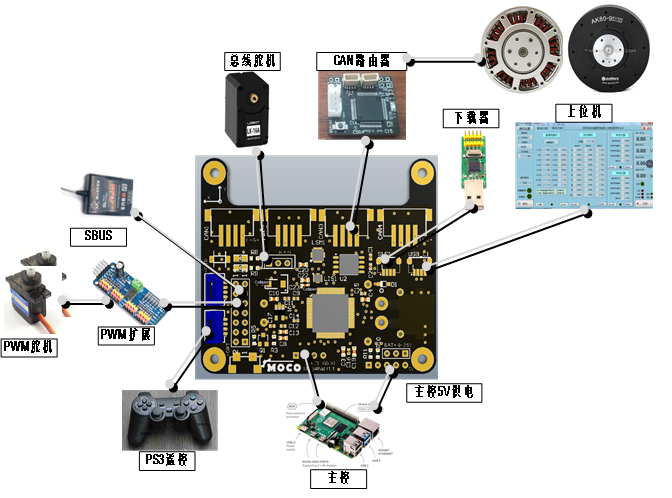
控制器电气连接主要完成控制器PWM与舵机或无刷电机驱动器的连接,PWM供电线与电池的连接,载板供电通过主控提供,遥控器的连接,USB与上位机的连接,外扩模块与串口的连接,另外树莓派可通过SPI或者UART6同时实现连接,当使用UART6时板子左侧的独立端子则无法使用,则具体连线示意图如下所示。
3. 配件的采购
开发板默认不提供供电模组,需要外购降压模块或者DC适配器,主控采用ODroid-C4 5V-4A DC头作为供电输入,因此为了保证使用可以另外购买如下的配件:
(1)如果需要5V适配器推荐:
(2)如果需要机载供电推荐降压模块(5V 4A):
(3)ODroid-C4没有板载WIFI因此需要通过网口连接路由器:
注:默认镜像已经固定IP具体查看和配置方式参考知乎

