在你准备好了所有一切物料后我们就可以一同开始DIY四足机器人的旅程,整个机械组装过程大约1小时,电气标定30分钟,之后您就可以开始愉快的四足机器人开发,下面首先让我们完成Tinymal-B机器人的组装:
前后侧展模组安装
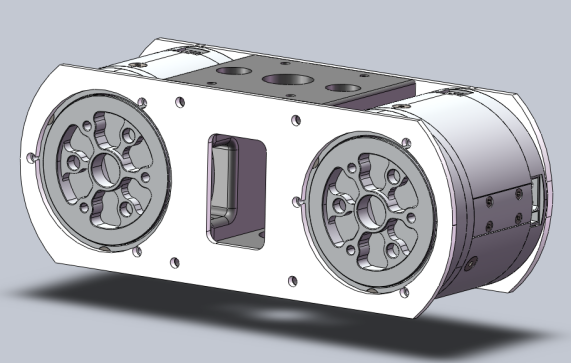
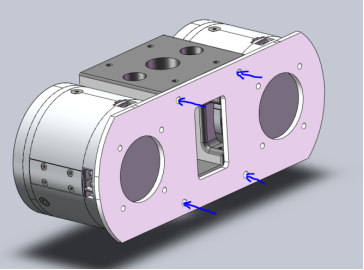
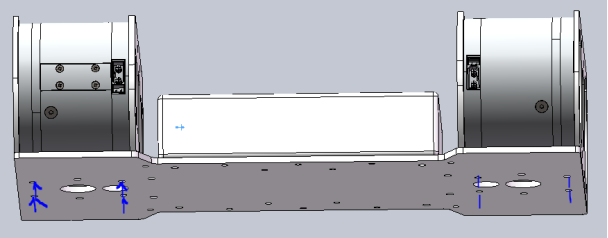
前后模组共需要4个电机,在使用电机之前请自行DIY供电线(注意正负极),使用USB转接模块和达妙提供的上位机完成对电机的标定与参数配置(详情参看附录1)。4个电机的CAN ID配置需要为3,电流环带宽为2000Hz,前后模组组装后的整体造型如下所示:
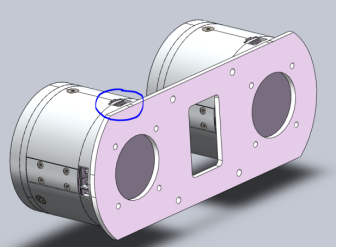
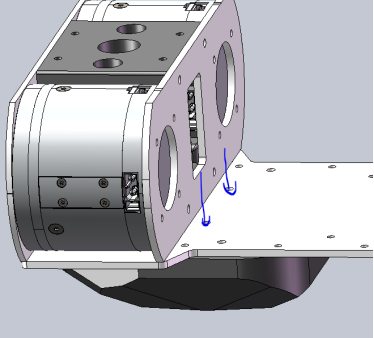
1)首先我们完成两个电机与后板的安装,采用M2.5*5螺丝进行固定,注意图中蓝色圈标注的电机调试口需要向上:
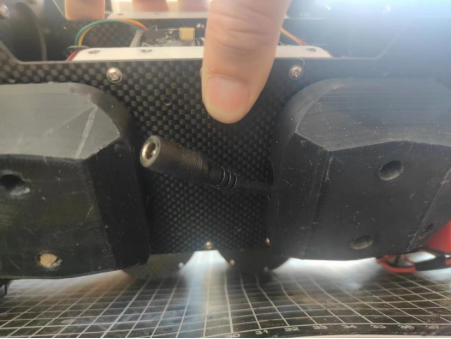
完成螺丝固定后需要将达妙电机配套的供电插头进行安装并从中间孔洞引出线路(注意区分并标注其CAN线H和L各自的颜色,记录在纸上方便后续焊接):
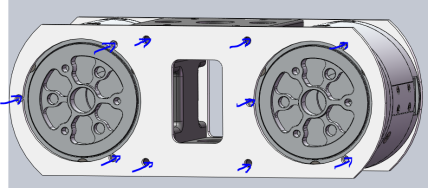
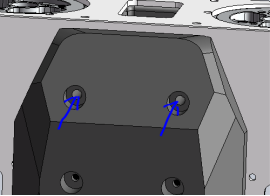
2)安装中间支撑3D打印件,采用M3*5螺丝拧入箭头位置:
3)同理完成前部支撑碳板的安装与螺丝固定,前方碳板安装时,拧入电机的安装螺丝需要采用M2.5*D7垫片:
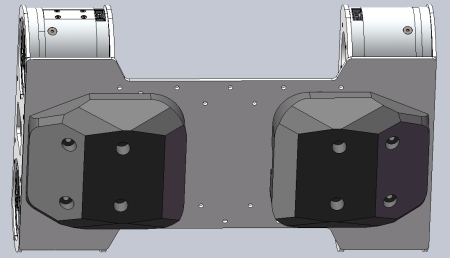
4)采用相同的方法完成另外一个模组的安装与线缆引出;
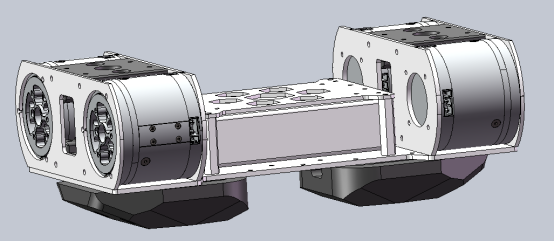
机架底座安装
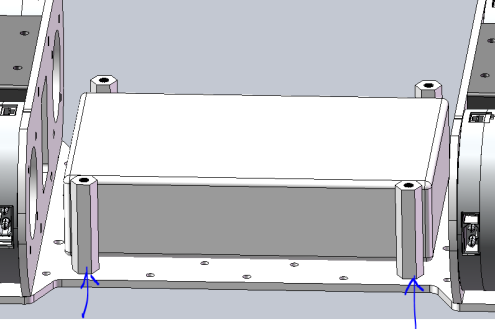
此步骤需要3.1步骤安装好的两个前后模组,动力电池以及底板,组装后的整体造型如下所示:
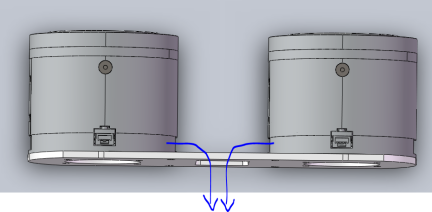
1)首先使用已经安装好的两个前后模组,由于我们需要将电池的充电头引出到机体下方,因此需要按下图所示走线沿着模组将DC充电头引出到下方:
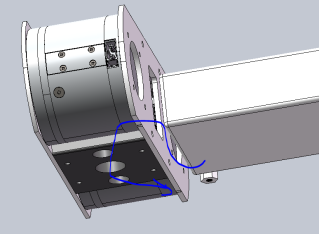
之后将前后两个模组安装到底板前后对应位置,采用M3*16螺丝从底部固定,注意这里每个中间模组的4个螺丝均需要牢固拧紧:
注:这里电机的调试口需要超上这样我们后续安装完顶板后也能连接上位机进行调试与维修!
2)安装底板装饰打印模块,注意安装时需要将充电头从其装饰的缺口中引出,采用M3*16螺丝固定:
采用M3*16螺丝固定头部:
同理安装另外一侧底部装饰:
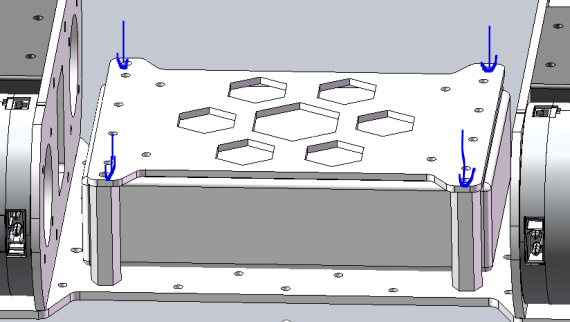
3)安装4个M2.5*30铝柱,并用双面胶将电池粘粘到底板中间部分,各方间隔差不多:
之后安装电池上板,采用M2.5*5螺丝固定: