
在你完成了第三节整个步骤后机器人的主要结构和电气已经基本完成,这里请反复确认正负极供电和CAN线高低,无误后打开空气开关机器人即完成开机,等待载板的蜂鸣器开机音乐(注意打开载板开关)下面让我们进行一个简单的测试。
1)默认出厂前我们已经默认烧录了载板固件,等待路由器完成WIFI建立并连接(默认我们已经帮完成了配置SSID:Tinymal-B Password:11111111,如果没有请自行参考附录配置路由器,具体可以查看附录中路由器配置);
2)采用Windows CMD窗口ping IP:192.168.1.120是否成功(请具体查看发货时标注的主控IP,后续控制例程凡涉及该IP均需要修改);
3)默认我们已经设置了程序的自启动,在主控烧入了程序。在PC机上插入USB手柄然后打开我们的上位机(遥控器需要再打开上位机之前提前插入,否则不识别),选择对应主控IP的端口(三个下拉菜单对应IP可在上位机配置文件夹中txt文档修改):
上位机默认会自动检测串口设备,因此在操控时如果电脑有串口设备会导致无法选择UDP接口
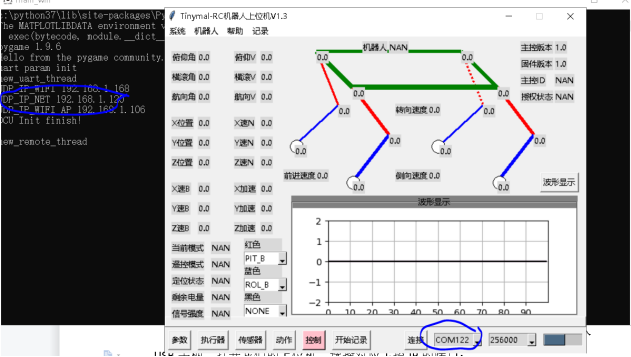
下拉菜单选择对应IP的名字,如果选错可能无法连接需要重新打开一遍上位机
4)如连接正常后应当显示机器人姿态,且各个关节数据不为0,摇动机器人姿态和各个腿确认是否IMU数据变化,各腿关节数据变化,系统正常
5)将机器人放置于平地,下面我们进行基本标定教学,手动微调侧展电机保证其与地面水平,将足端下压保证严格与地面接触,保证各腿一致的位置:
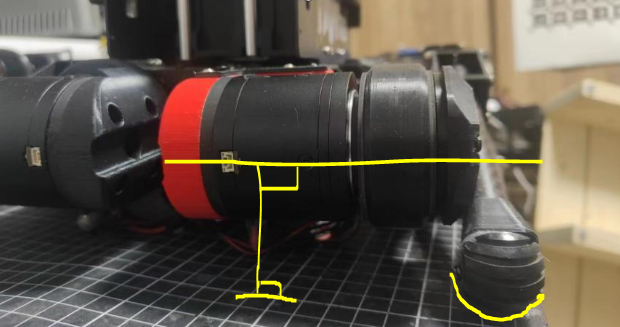
标准的标零位置,各腿可以有偏差但需要左右侧对称
6)长按遥控器Y按键,如出现提示音后看到上位机角度全变为如下值则完成角度标定:
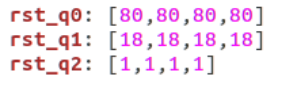
q0为大腿 q1为小腿 q2为侧展
达妙电机BUG
7)进入上位机传感器界面,分别按下标定加速度与陀螺仪,清除姿态的偏差:
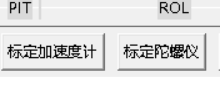
标定后机头朝向PIT为负值,向右倾斜ROL为正值
8)下面我们进行简单测试(这里需要提醒一下遥控器方向键下为断电),因此后续操作如果出现不正常现象请及时按下该按键,如遥控器失效可以直接断开开关;
注意:达妙电机该版本固件在标定零位后,直接开电机使能会出现异常抖动需要重新上电即可正常!
9)将机器人腿稍微调整位置,长按X+RR(RR为遥控器前侧,非后面扳机按键),此时机器人将收腿,如没出现异常抖动,机器人将保持与标定时相似的角度,即初始化角度成果;

10)此时按LL,用手保护机器人,机器人将垂直站立,如无抖动或摔倒则整个机器人已经工作正常,此时右摇杆可调节姿态;
11)按RR机器人蹲下,完全触地后按下断开电源,或者可以按下Y键采用软模式;

12)恭喜你!你的Tinymal已经功能完全正常,下面就让我们进行最后的组装吧!

