在完成主要机器人的结构的安装后,我们需要开始完成电气供电线的连接,其主要包括延长各个腿电机的CAN线、供电线;合并3条腿电机的供电线正负极为1路XT端子;重新制作电池供电连线,采用空气开关实现整机供电;焊接主控降压模块;
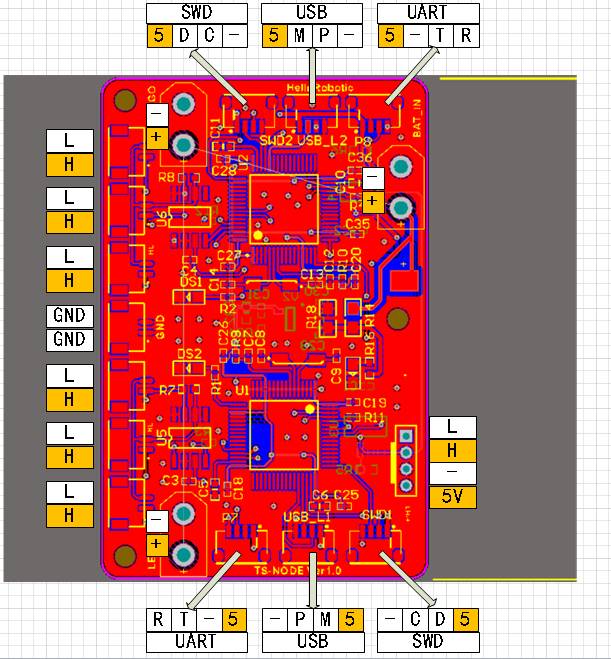
节点板后部供电线连接
在电路板背面端子引脚处,完成两个双路节点的线路焊接,注意同一个端子焊接后线路不要发生短路
1)首先我们完成对各电机连线的延长,首先完成对电机正负供电线的延长保证各电机能沿着各自的路径到达机体内部,方便后续连接节点板。
CAN线制作注意板子上的丝印与电机一致,将配套的2P线与达妙电机配套端子的CAN线延长焊接
我们之前已经完成了膝关节电机内部线路的引出完成其与电机接头的焊接(注意供电、CAN的正负高低),运动关节流出余量并插入大腿电机,采用相同方法完成4个膝关节电机线路的焊接:
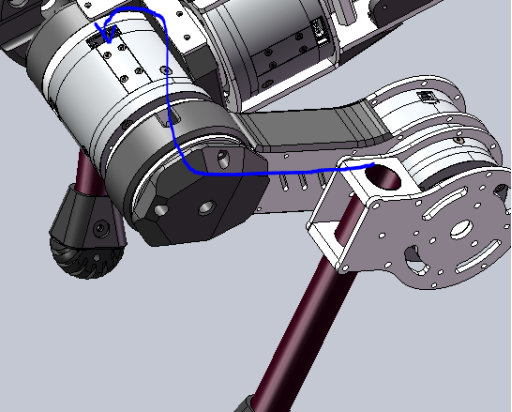
在大腿电机下发插入端子延长走线至机体内部,转动侧展确认走线余量:
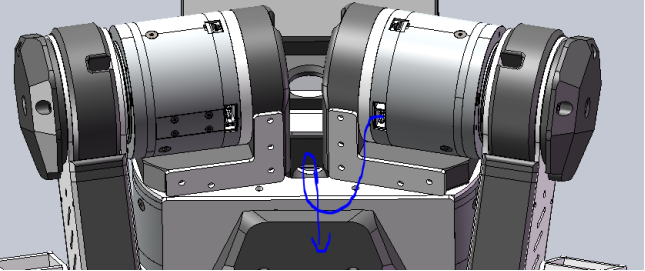
将之前前后模组引出的端子线通样延长,然后将正负极与上图的走线合并成一个XT公头端子线:
2)同理延长大腿电机CAN线,最终各腿引入机体内部的CAN线共有两路:分别是侧展电机,大腿膝关节合并线路,将其与我们配套的2P CAN线连接,按节点板CAN口丝印确认HL匹配!!
3)依照上面的方法完成4条腿向机体内部线缆的引入,做好绝缘!!;
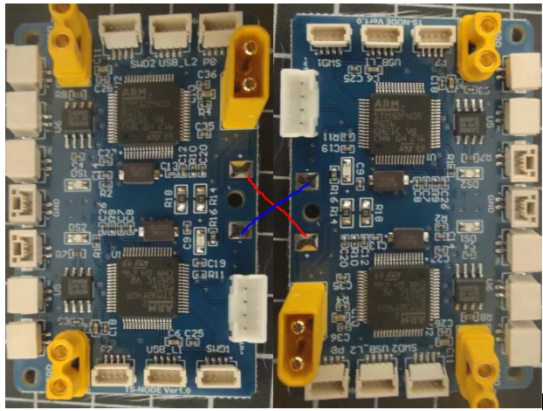
4)将两个TS-NODE节点模组安装到3D打印底座上,CAN口朝向电机出线侧,采用3M胶固定在电池盖中央;
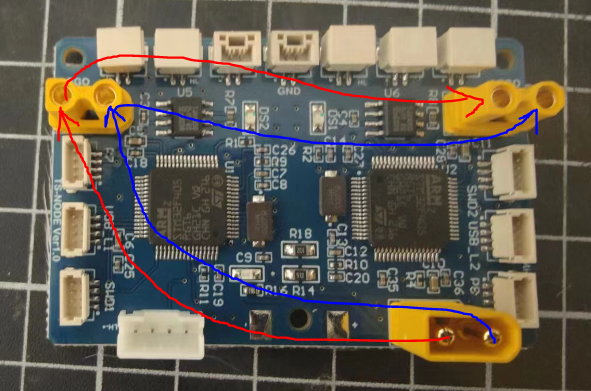
两节点板板间供电互联
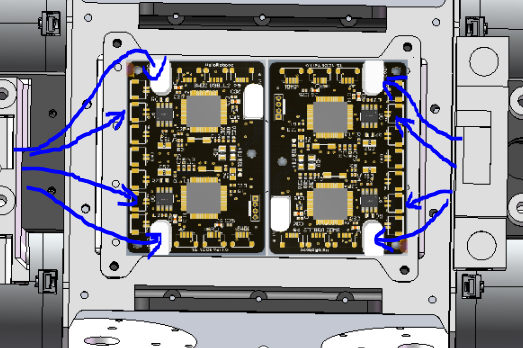
5)将各腿CAN线和供电线分别与对应端子连接,注意检查正负!
由于制作版本问题TS-NODE CAN端子可能出现卧贴和立贴版本,请在制作线缆时确认电路板上丝印HL高低与真实对应
6)下面完成对电池线路的改造,这里较为危险请一定按照说明步骤完成:
7)首先仅剪断电池XT供电输出的负极,将与我们提供的XT母头单甩线的负极焊接,再在焊点处焊接另外一个XT母头单甩线的负极,统一做好绝缘,将两个单甩线的正级拧在一起,并压如入空气开关中,做好绝缘;
8)将电池正极从原始端子头部剪断,将其拧入空气开关另外一个端口中,将两个XT端子分部插入TS-NODE上的公头端子,则此时空气开关就完成了对电池向分电板供电的开关作用;
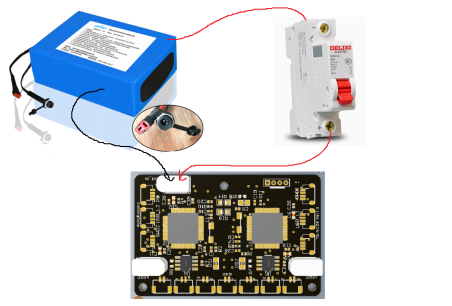
由于我们两个板子间用飞线连接,因此可仅用一路供电
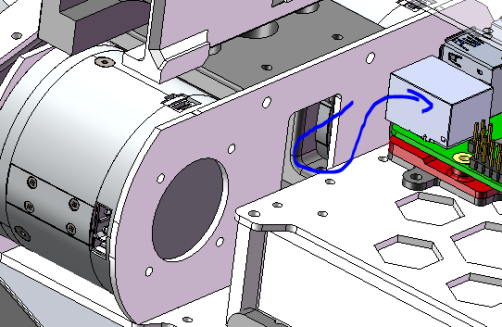
9)由于节点板上我们已经预留了24V供电的焊盘,因此可以焊接走线将其与5V降压模块连接,模块输出焊接DC插头,如果你需要同时支持感知SLAM控制器则采用通样的方法在另外一个节点板上引出降压模块;
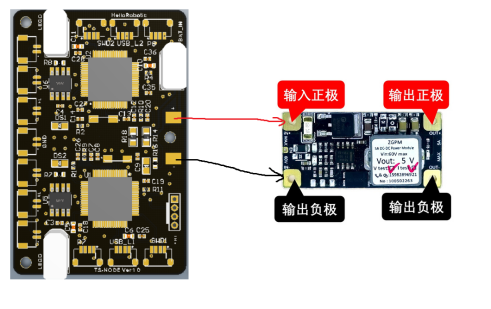
如果需要为JetsonNano供电,需要单独再采购一个24转5V 3A以上的模块,采用相同方法焊接!
10)确认供电正负级无误后打开空气开关,则所有电机将正确供电电机LED亮起,同时降压模块相应LED也亮起,DC头输出5V电压,注TS-NODE节点仅采用主控供电因此此时不会工作;