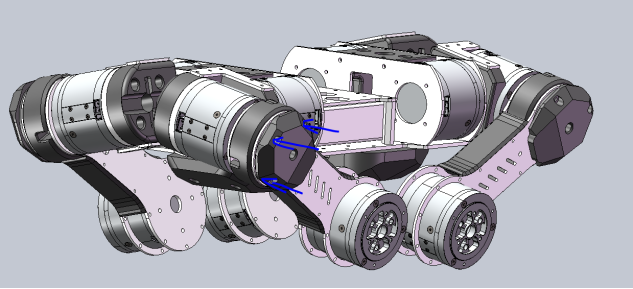
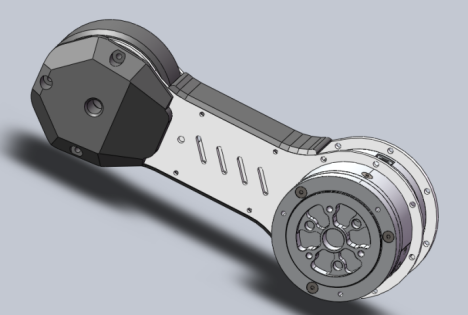
此步骤共需要4个电机,完成4条大腿的组装。在使用电机之前请自行DIY供电线,使用USB转接模块采用达妙提供的上位机完成对电机的标定与参数配置(详情参看附录1),4个电机CAN ID配置为2,电流环带宽为2000Hz,大腿组装后的整体造型如下所示:
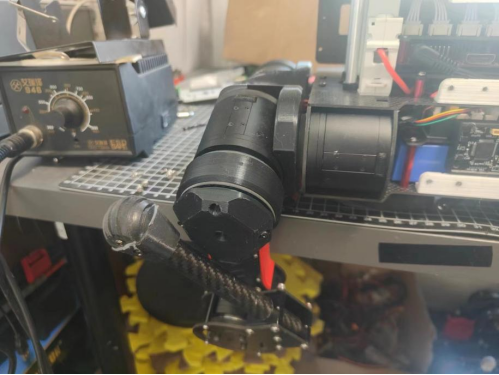
1)首先完成膝关节电机的固定,采用M2.5*5螺丝,注意电机供电口朝向机臂内侧,由于后续走线需要提前连接好插头,采用我们提供的线延长原始的CAN和供电线:
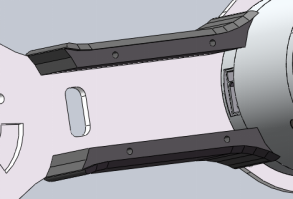
2)安装侧面装饰3D打印件,采用M2.3*5螺丝从背部固定:
3)安装支撑小铝柱,注意如果遮挡了调试口则去除,供电口处需提前塞入堵口3D打印件,由于膝关节冲击频繁建议此处铜柱的螺丝打上螺纹胶:

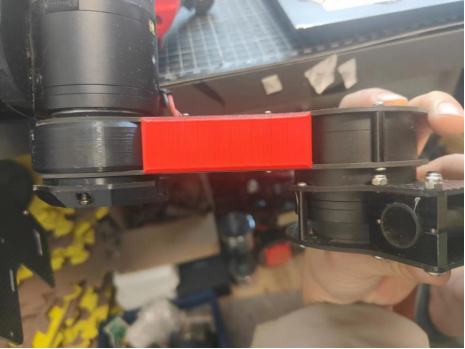
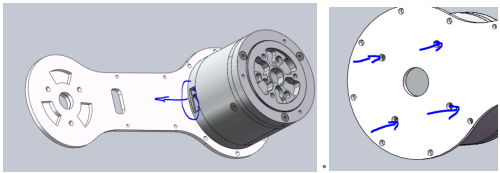
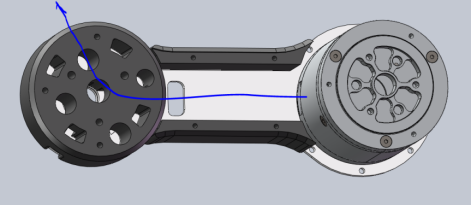
4)简单固定大腿轴处的3D打印件,将延长的电机走线依据腿的方向从上引出:
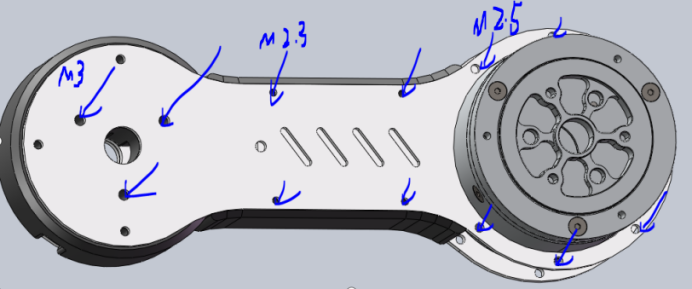
5)安装上盖,采用M2.5*5螺丝固定电机周围的铝柱,采用M2.3*5螺丝固定上板与侧面装饰打印件,穿入3个M3*35螺丝防止圆形打印件的转动:
6)依据同样的方法完成4个大腿臂的安装,最终配合主机架完成大腿的连接,注意需要增加对应碳板垫片(厚度2.5mm),拧紧大腿连接螺丝,建议各螺丝逐步拧紧最终保证与电机平行紧密接触:
最终,安装大腿装饰打印件M3*16螺丝固定,安装完4条腿的机器人如下图所示: