一、Tinymal-B桌面版介绍
警告:本教程仅面向熟悉电子DIY的爱好者,机器人组装需要软件调试、焊接、安全供电等知识,需要相关螺丝、扳手等安装工具,如果不熟悉造成的问题,概不负责!
1. 简介
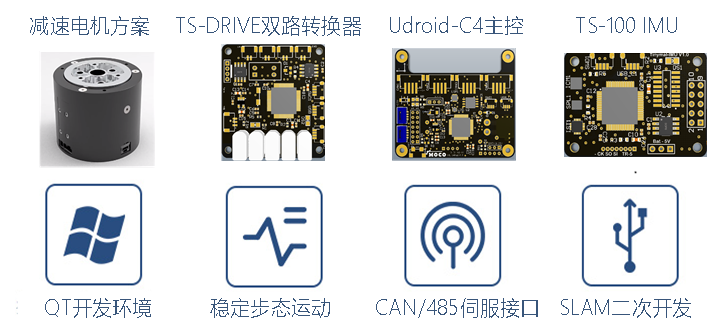
Tinymal-B桌面版是HelloRobotic推出截止2022年为止世界上公开最小的支持力控制的桌面级四足机器人,其自重6kg关节具有12个自由度可进一步扩展轮足模组,搭载高性能Linux处理器可用于运行MPC和非线性轨迹规划等算法,方便大家研究四足机器人步态控制。机器人尺寸小、安全性高,成本低方便用于教学开发和科研,面向机器人运动控制、SLAM感知、集群开发需求。
机器人配套完善的软硬件开发,深度开放底层代码,提供基本的步态Demo方面没接触过力控的开发者快速入门运动控制项目。桌面版机器人散件采用了HelloRobotic推出的标准化仿生机器人模组可以实现快速搭建,通过配套上位机可实现点击快速一键标定:
本套件列表如下:
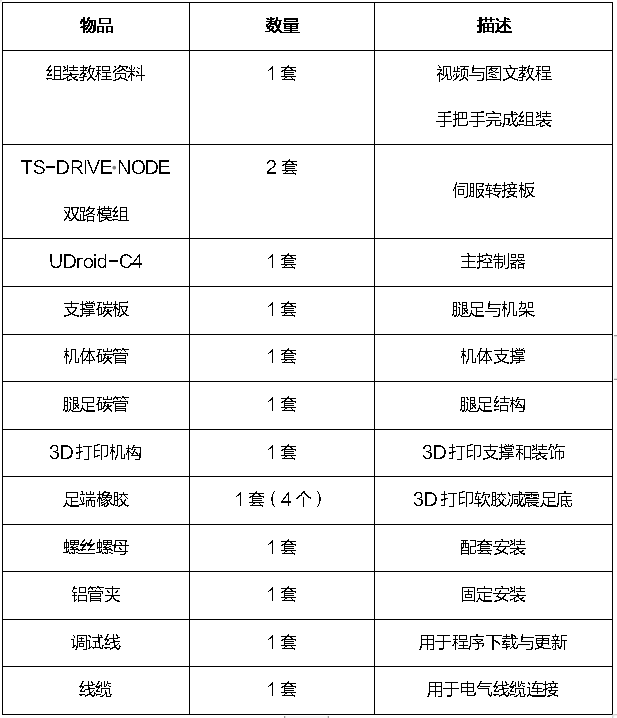
注:为了降低成本,Tinymal大量采用了目前淘宝可以采购到的通用模组,请在购买套装之前同时也采购如下的配件(黄色为必选):
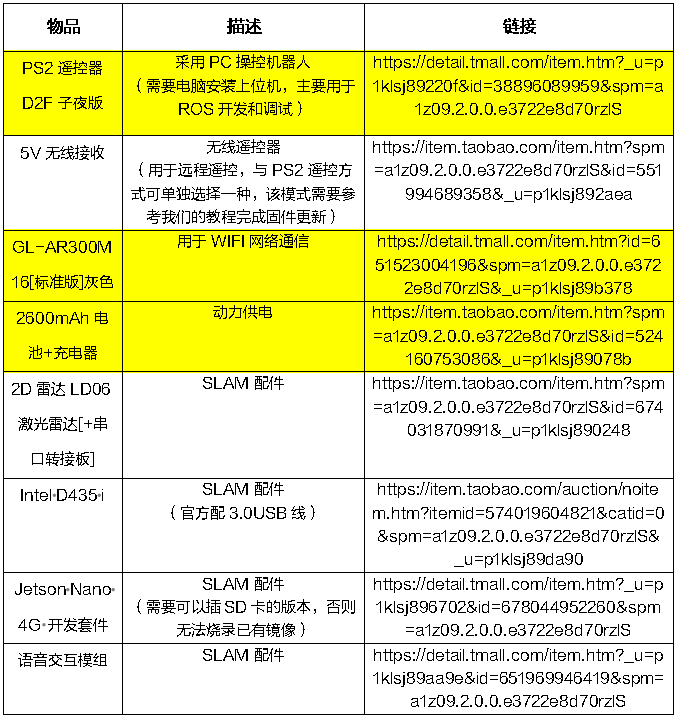
详情可咨询客服
- https://detail.tmall.com/item.htm?_u=p1klsj89220f&id=38896089959&spm=a1z09.2.0.0.e3722e8d70rzlS
- https://item.taobao.com/item.htm?spm=a1z09.2.0.0.e3722e8d70rzlS&id=551994689358&_u=p1klsj892aea
- https://detail.tmall.com/item.htm?id=651523004196&spm=a1z09.2.0.0.e3722e8d70rzlS&_u=p1klsj89b378
- https://item.taobao.com/item.htm?spm=a1z09.2.0.0.e3722e8d70rzlS&id=524160753086&_u=p1klsj89078b
- https://item.taobao.com/item.htm?spm=a1z09.2.0.0.e3722e8d70rzlS&id=674031870991&_u=p1klsj890248
- https://item.taobao.com/auction/noitem.htm?itemid=574019604821&catid=0&spm=a1z09.2.0.0.e3722e8d70rzlS&_u=p1klsj89da90
- https://detail.tmall.com/item.htm?ali_refid=a3_430582_1006:1678388859:N:v2O66a8DU7qKn6EYlH26bTps63UxR1gU:ae0a054106eb0e99bf74147c55737212&ali_trackid=1_ae0a054106eb0e99bf74147c55737212&id=678044952260&spm=a230r.1.14.1&skuId=4877021805094
- https://detail.tmall.com/item.htm?_u=p1klsj89aa9e&id=651969946419&spm=a1z09.2.0.0.e3722e8d70rzlS
电池可替换选择链接:
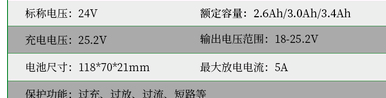
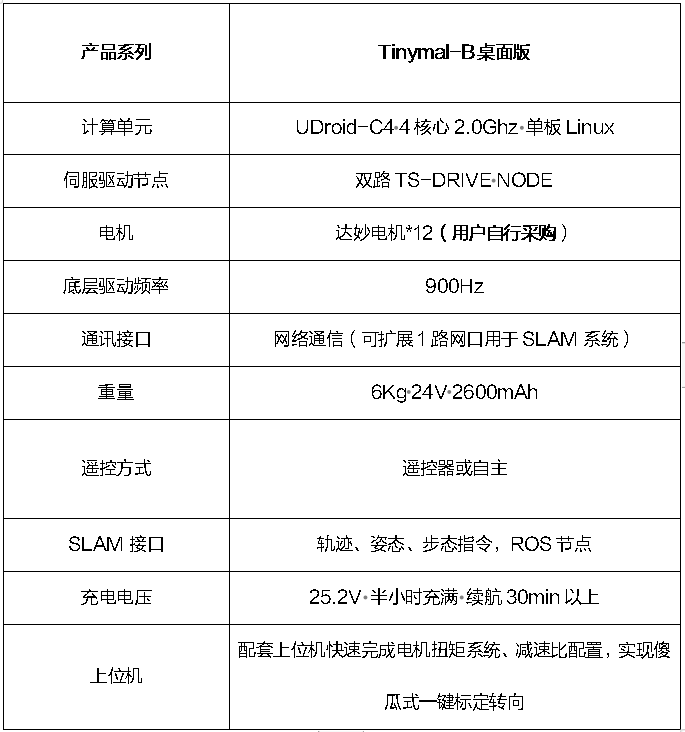
Tinymal-B桌面版机器人完美缩比ETH苏黎世联邦理工大学开发的Anymal-B的造型,但采用了HelloRobotic设计的算法完成机器人运动控制,关节直驱大大降低机构复杂度与维修安全难度,机器人具体性能参数如下表所示:
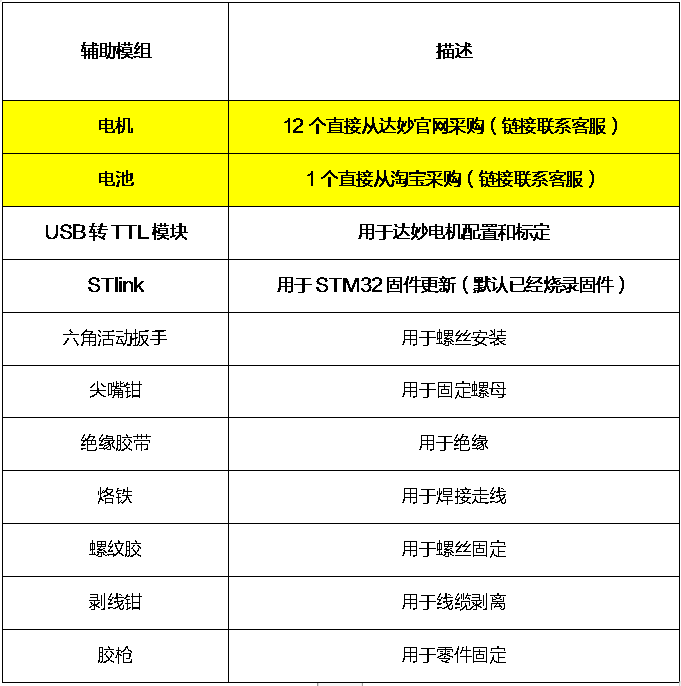
2. 组装前准备
Tinymal-B桌面版目前仅支持散件发货用户自行组装、焊接因此具有较高的入门门槛,当然这也是为了尽可能降低成本让更多人能体验到四足机器人的制作乐趣。因此在组装前除了采购我们的DIY套件外,还需要提前准备如下的工具采购相应的模块: