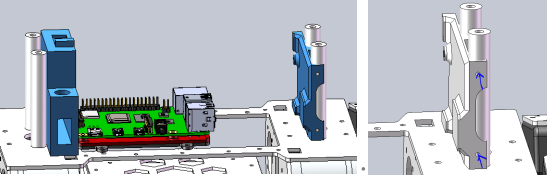
在完成了电机标定和走线安装后,首先采用扎带和绝缘胶完成对线缆的固定、整理,之后安装上板在安装前需要将4个铝柱提前固定(用于支持顶盖),这里推荐打上螺纹胶,之后完成侧板支撑打印件的安装,采用M3*8自攻螺丝:
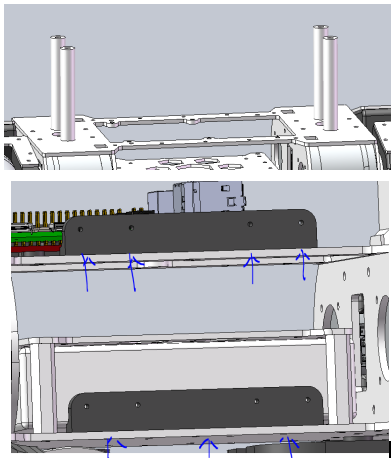
上图完成铝柱安装,下图完成侧板支撑件安装
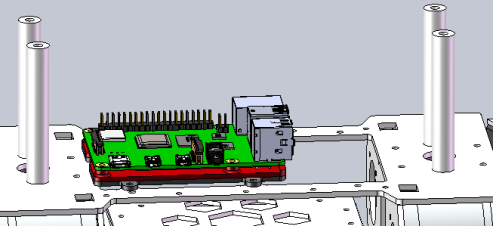
1)之后完成对上板的固定采用M3*16螺丝拧紧,注意这里需要保证后续主控安装后网口朝向机头:
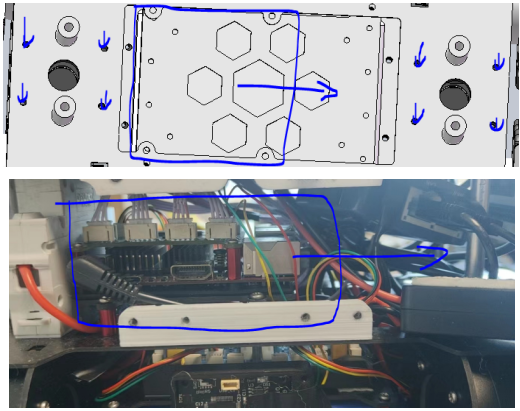
2)在确认电气无误后,采用M3*10铝柱支撑主控(否则高度不够会与下面的节点板供电线干涉),并在上下方拧入M3*5螺丝,下面的螺丝需要安装垫片且打入螺纹胶,注意由于机器人采用板载IMU因此要求此处的螺丝安装牢固:
3)用3M胶将空气开关固定在主控后方(之前一定需要将上板于侧展中间的打印件连接螺丝拧入),将路由器安装于主控前方,注意路由器网口的朝向(路由器配置IP默认为1网段,IP:192.168.1.1),将路由器供电USB连接至主控USB口,网线与主控网口连接;将4个节点板CAN线连接至主控,将降压模块DC供电口连接至主控,最终拧紧路由器支撑模块侧面螺丝让其不在铝柱上滑动:
4)至此机器人整个电气和机构都已经完成了安装,此时我们可以先进行简单测试之后再安装其他的装饰结构。
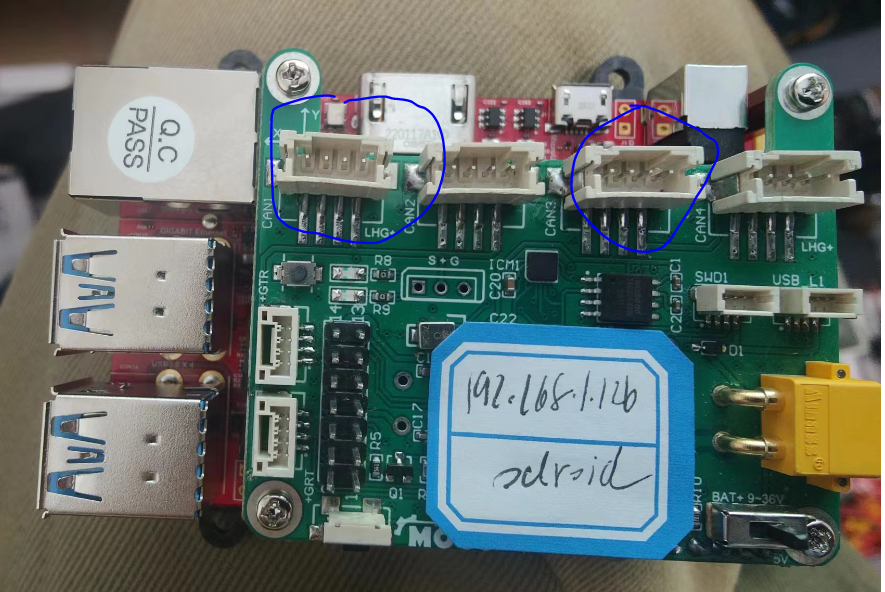
注:主控供电采用降压模块和配套DC头直接连接ODroid板子的DC母座供电电压5V,另外由于版本区别如果TS-NODE上仅有1个4P端子则与主控连接需要连接到如下两个端子,而不是紧临的端子!