
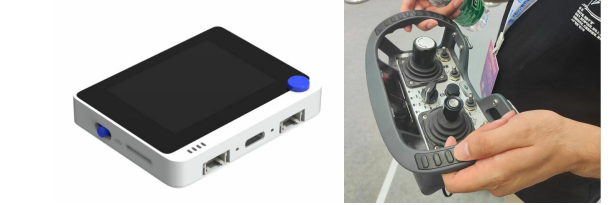
TS-Quad Terminal是针对足式机器人产品研发和优化的低成本控制终端,其借鉴了Anymal采用的操控端,不同于市面上传统四足机器人采用的Xbox遥控器,除了具备基本的遥控外,还可以实现对机器人当前状态3D模型数字孪生的实时显示。基于开源Wio Terminal和Arduino的生态,我们提供了开源的操控端源码方便用户基于自己的需求完成功能修改,其搭载的WIFI模块能够方便地与机器人控制器进行连接:
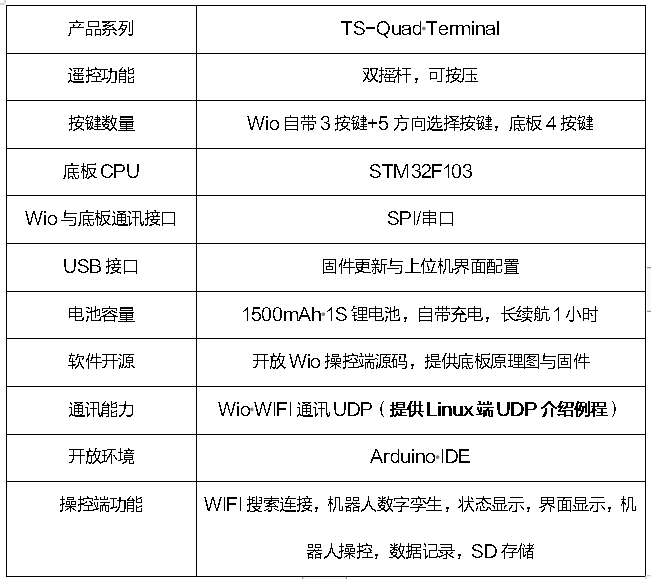
基本参数

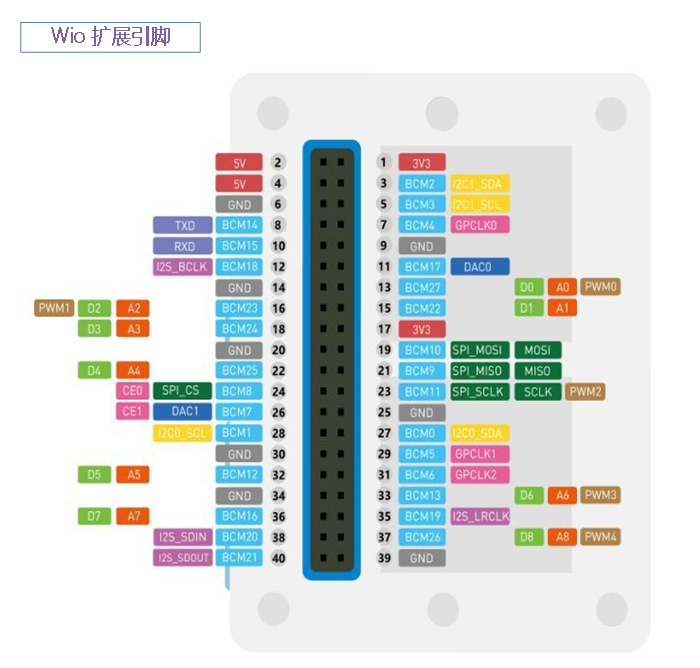
(1)Wio官方介绍:
(2)Wio WIFI兼容固件更新方法:
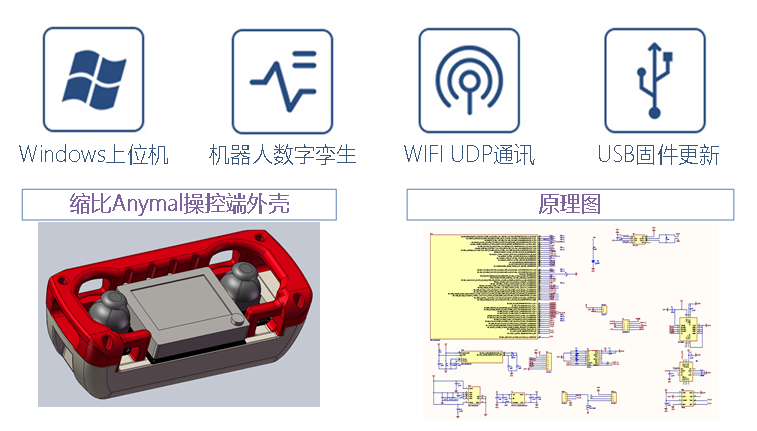
遥控底板机械接口

