
先打开红色(动力开关),再打开电源给主控供电:
连接Wifi:
Tinymal
密码:11111111
路由器管理地址:192.168.1.1 管理密码:11111111
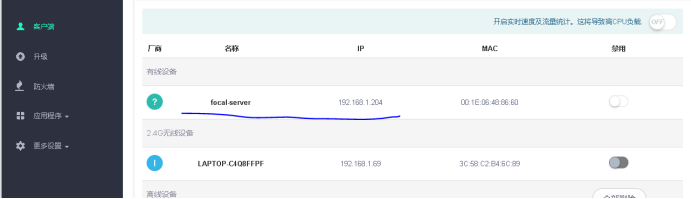
在客户端界面查看主控IP:
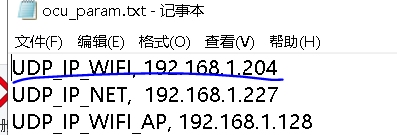
修改上位机配置文件IP:
连接遥控器后打开上位机,选择对应WIFI名称,正确则显示机器人姿态与角度:
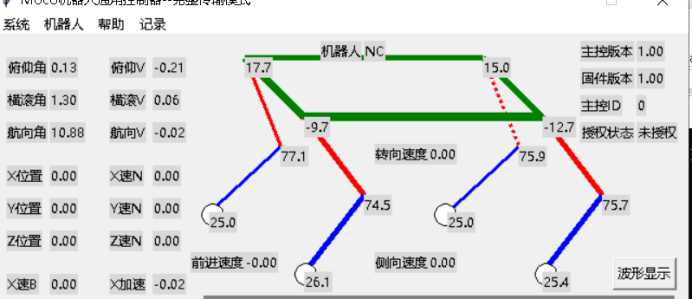
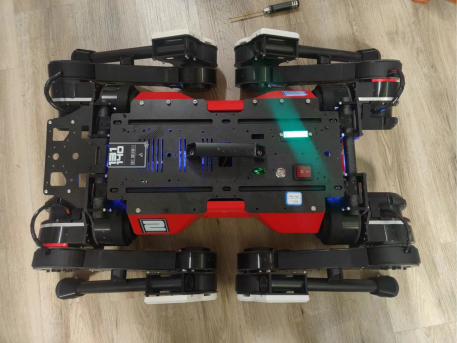
默认收腿状态下关节角度参考如上图所示,如某个角度与上述值偏差大于10°以上则需要重新标定角度,默认机器人摆放状态如下图所示:

之后参考Tinymal的遥控方式即可,程序更新与参数下载参考Tinymal教程并修改对应主控IP地址,主控用户名为odroid密码为1!

