
4P下载线
链接:https://pan.baidu.com/s/1cWCP--ddWLL22pIXKqVfIg
提取码:aing
--上位机下载地址,图片文件夹放D盘根目录,里面txt文档可修改后续主控IP首先在开始前确保电机供电正常,所有电机CAN ID已经用上位机按我们步骤中的流程完成了修改,则此时在上位机中显示的角度变化所有大腿都是1号电机,膝关节2号电机,侧展为3号电机;
1)下面我们开始完成对各关节电机的标定,首先需要确定机器人的机头方向,并用胶带完成简易标注防止后面忘记(图中箭头方向),则我们4条腿对应的TS-NODE中的CAN节点ID如下:
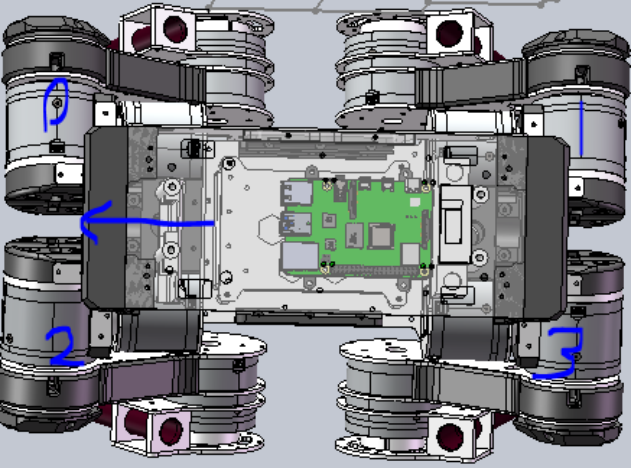
如上图所示,0号腿的所有CAN线应当与0号STM32的端子连接!
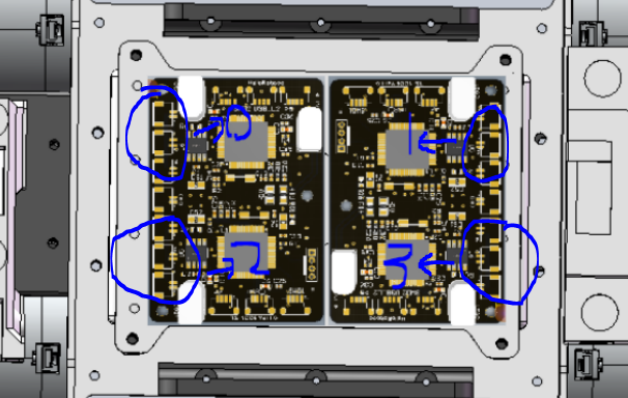
采用USB转接模块首先连接0号单片机USB调试口,完成如下配置,保存即可,具体角度标定说明可参考《附录3》,注意先连接调试口再打开电源,确认每个节点三个电机都有角度数据:
上位机调试时,USB连接4P端子线均为每侧 中间端子
- 注意:如果你的TS-NODE USB端子是立贴的,那请使用4P异面的连接线与转接端子配对,才可以进行下载,否则无法通讯!
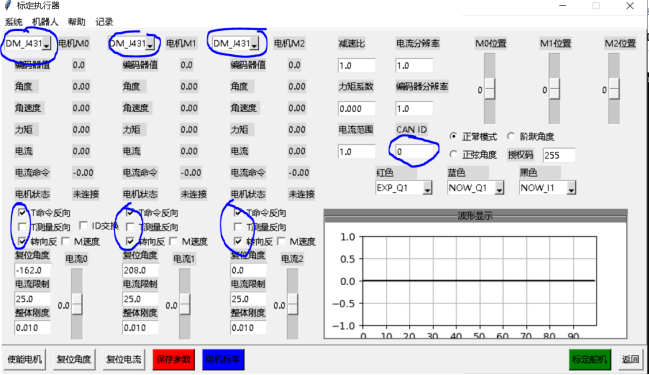
节点0配置参数
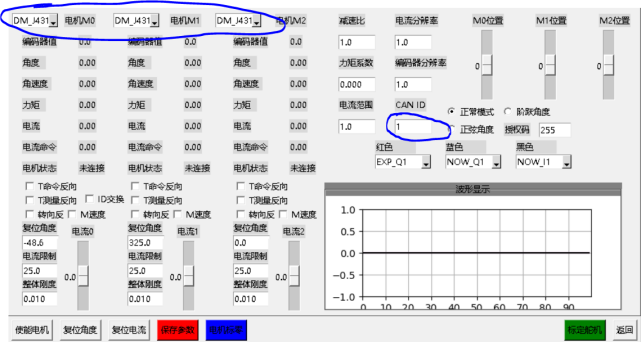
节点1配置参数
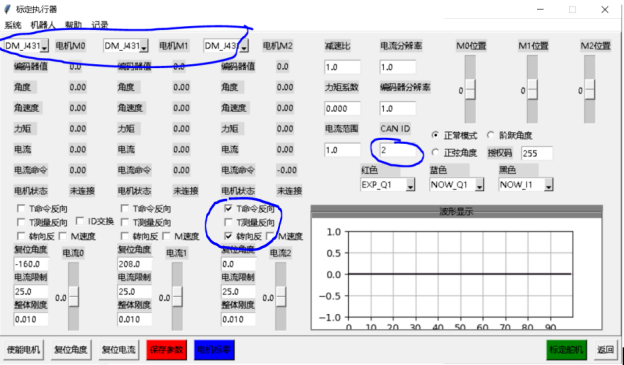
节点2配置参数
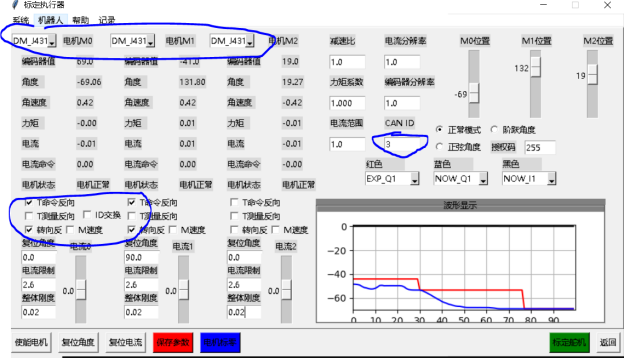
节点3配置参数

