
ANYmal是瑞士苏黎世的ANYbotics团队研制的高性能四足机器人,ANYmal的意思是希望该机器人能在任何的地方稳定移动,从而在危险的工业环境中为人类提供帮助,Anymal-B像一只中型犬,重30公斤,集成了高性能运动控制器与深度感知系统,借助优异的运动控制算法让Anymal能全自主地在复杂废墟环境下自主搜索,其特殊的内肘机甲造型与市面上的四足机器人非常不同。
Tinymal-B桌面版完美地缩比了Anymal-B的机械结构特点,着重保留了其膝关节电机直驱的特色,以及其整体壮硕,机甲防护的特色。Tinymal-B为1:10缩比模型,是目前少有的桌面级采用力控制的四足机器人平台,整机不到6Kg,方便携带,可随时完成力控制算法的研究,可运行MPC、VMC+QP等四足机器人运动控制方法,其即可以作为缩比模型收藏、也可以用于机器人运动算法的开发测试!

(1)基本运动能力测试:

Tinymal-B系列机器人,可选配Quad-Terminal终端学习UI开发,并提供Arduino下的提供二次源码(选配):

可搭载视觉、雷达SLAM模组轻松上手四足机器人导航规划(选配):

可搭载视听一体化模组,完成智能交互与表情互动(选配):

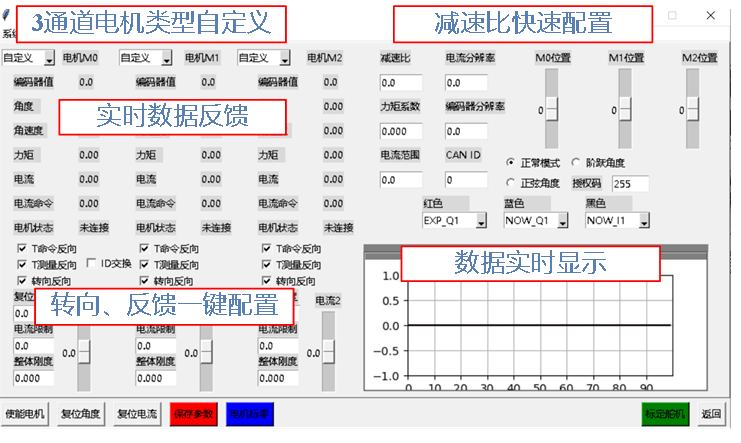
傻瓜式上位机,采用大疆Naza飞控的向导式界面完成关节电机配置:
如果需要购买散件请资讯:
DIY提示

