
1 项目简介
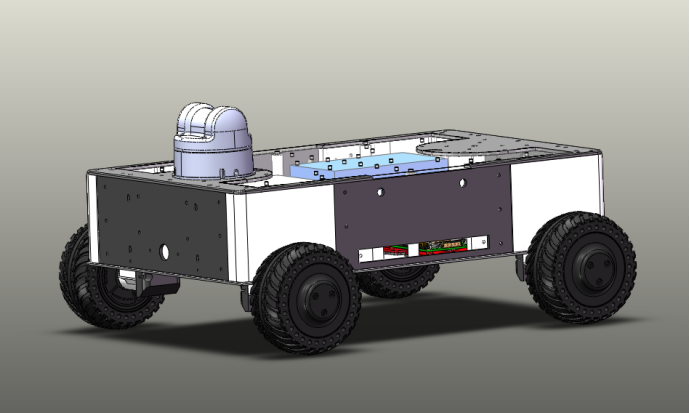
RoboButler是一个面向快速实现自动驾驶与自主导航算法开发的四轮移动底盘项目,项目采用碳板切割与3D打印,采用通用货架产品实现核心的电器控制,整车成本小于8000RMB,可以实现运行CMU的Far planner自主导航算法,实现室内空间3D雷达地图构建与自主探索,并可以结合RoboButler上肢组件,构成用于部署具身智能控制算法的低成本开发平台
2 硬件组成
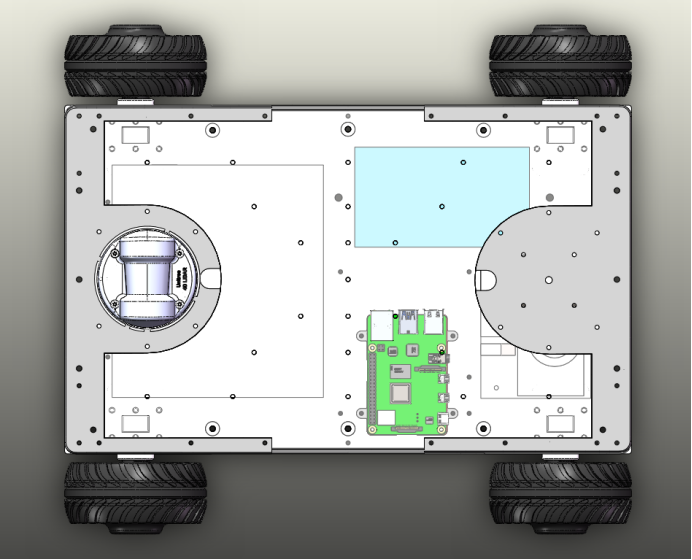
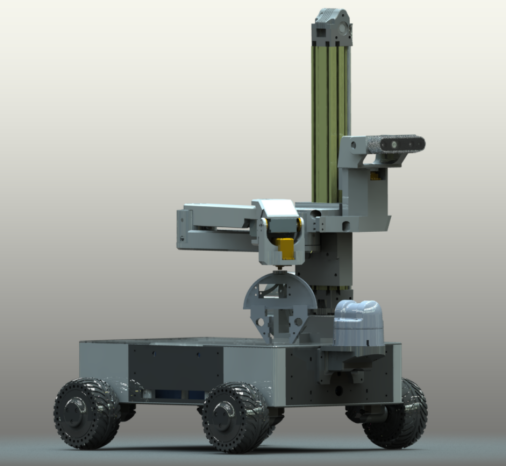
RoboButler搭建的目的是构建一个通用的轮式底盘,采用最简单的模块、货架产品以及3D打印材料构建一个具备3维空间自主导航与自主搜索的移动机器人平台,并且可以进一步扩展机械臂载荷实现具身智能复合移动作业算法和软件的开发与测试。因此项目采用了目前市面上最便宜的轮毂电机与激光雷达,基于CMU的Local Planner作为核心构建一个面向室内复杂环境的移动机器人平台,具备在线建图、自主导航、路径回溯、高精度三维测绘、自主搜索功能,可以满足基本的室内自主巡逻或面向未知空间的探索任务。
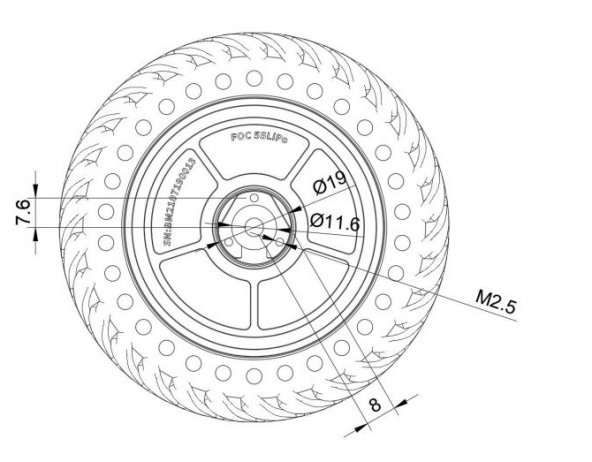
项目采用了低成本轮毂直驱电机,采用4轮全驱动差速的控制方式实现原地转向与快速机动:

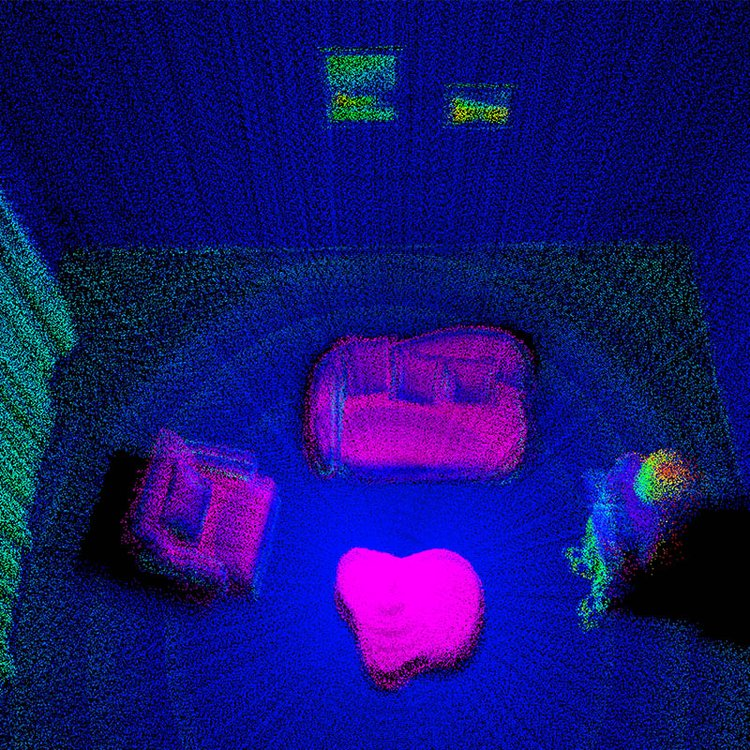
底盘为了低成本采用了宇树科技的 L13D激光雷达:

整机基本参数如下表所示:
| 属性 | 参数 |
| 长度 | 0.5m |
| 宽度 | 0.4m |
| 重量 | 5kg |
| 续航 | 1小时,24V 16000mAh |
| 最大机动速度 | 1.1m/s |
| 最大转向速度 | 60Rad/s |
| 底盘控制器 | Odroid-C |
| 感知计算机 | Intel I7 8核心 16G内存 |
| 外部接口 | CAN、以太网 |
| 感知模块 | 前后2路单目相机,三维激光雷达 |
| 交互模块 | 左右两路LED可编程灯条 |
| 作业载荷 | 人形上臂模组 |
3 软件功能
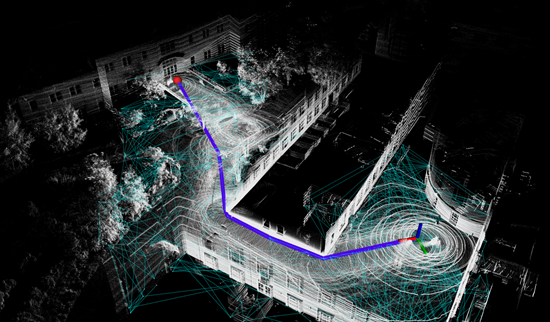
底盘采用Odroid完成485通讯可实现对4个轮毂电机的独立驱动,并且可实现扭矩控制实现动态的机动控制,轮毂电机可反馈精确的转速与扭矩可以对打滑检测,实现高精度里程估计,同时机载Intel高性能处理器可运行CMU的高级自动驾驶开源算法Far Planner实现三维地图构建与路径自主规划:
底盘基本软件功能如下:
| 软件功能 | 描述 |
| 轮毂电机驱动 | |
| 里程反馈 | |
| 三维地图构建 | |
| 自主导航 | 构建三维地图基于Fastlio2 |
| 路点跟踪 | 基于Local Planner实现真3D自主导航 |
| Far Planner自主搜索 | 基于CMU Far Planner实现未知空间搜索 |
| 初始位置估计 | 可实现对地图初始化位姿匹配 |
4 扩展模组
底盘可搭配RoboButler人形上肢模组组成为具身智能开发平台,实现模仿学习与遥控操控:
5 相关资料
组装教程:

